图13-18自动励磁调节器对功率特性的影响发电机装设自动励磁调节器后,当功角增大、UG下降时,调节器将增大励磁电流,使发电机电势Eq增大,直到端电压恢复(或接近)整定值UG0为止。为了定性分析调节器对功率特性的影响,用不同的Eq值,做出一组正弦功率特性族,它们的幅值与Eq成正比例,如图13-18所示。实际上,一般的励磁调节器并不能完全保持UG不变,因而UG将随功率P及功角δ的增大而有所下降。......
2025-09-29
磁场是电动机能量传递的介质,研究电动机必须研究电动机磁场。电动机磁场由通电线圈(绕组)产生,磁场可以用磁动势、磁通、磁链等参数表示。在忽略电动机铁心的铁耗和饱和时,绕组产生的磁动势与磁通成正比,并且相位相同,因此研究中常使用磁动势的概念。磁链是指磁通中与其他绕组发生交链的部分,磁链突出了绕组间磁场的互相影响。表征电动机绕组的主要参数有电阻和电感,在下面涉及的电动机电阻和电感都已经按定子侧折算。
1.电动机绕组的电感
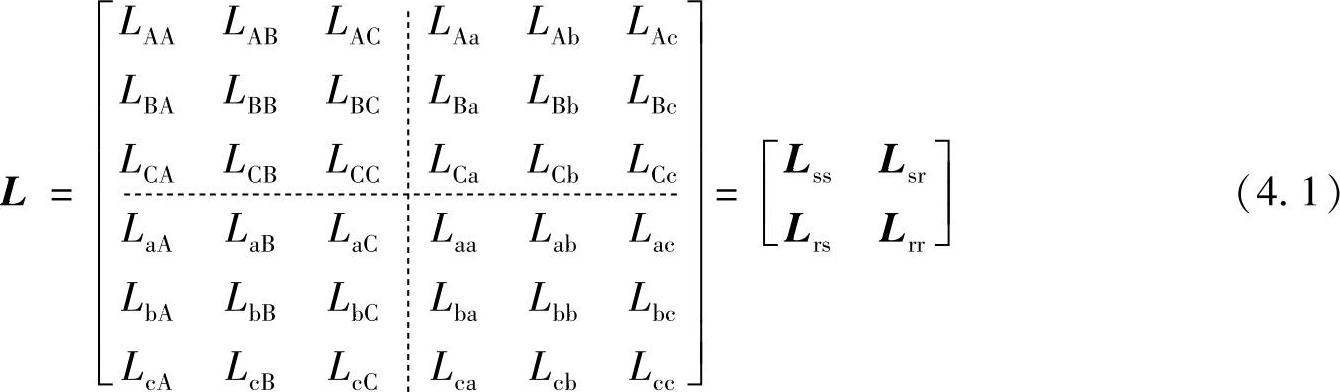
电动机定子和转子绕组在通过电流时都产生磁通,产生磁通的一小部分不经过气隙,仅在定子或转子的铁心中形成闭合回路,与其他绕组没有发生关系,这部分磁通称为漏磁通,与漏磁通对应的绕组参数是漏感Ll;绕组产生的磁通大部分通过了气隙并与其他绕组(定子或转子的绕组)发生交链,这部分磁通称为互感磁链,与互感磁链相应的绕组参数是互感。因为电动机绕组的对称性,因此,三相定子绕组的漏感相同,表示为Lls,三相转子绕组的漏感相同,表示为Llr。在近似认为互感磁通都通过电动机气隙时,三相定子绕组和转子绕组之间的互感都相同,表示为Lms,三相电动机每个绕组既有自感,也与其他五个绕组有互感,每个绕组的自感包括漏感和互感,因此电动机绕组的电感以矩阵表示为
其中:
定子绕组的自感LAA=LBB=LCC=Lls+Lms (4.2)
转子绕组的自感Laa=Lbb=Lcc=Llr+Lms (4.3)
定子绕组之间的互感

转子绕组之间的互感

定子和转子绕组之间的位置是随转角θ变化的(见图4.1),因此定子和转子绕组之间的互感(https://www.chuimin.cn)
LAa=LaA=LBb=LbB=LCc=LcC=Lmscosθ (4.6)
LAb=LbA=LBc=LcB=LCa=LaC=Lmscos(θ+120°) (4.7)
LAc=LcA=LBa=LaB=LCb=LbC=Lmscos(θ-120°) (4.8)
式中,θ=∫ωdt,ω为转子旋转角速度。
在式(4.1)中,Lss为定子绕组电感子矩阵;Lrr为转子绕组电感子矩阵;Lsr为定子绕组对转子绕组的互感子矩阵;Lrs为转子绕组对定子绕组的互感子矩阵。
2.三相电动机的磁链方程
电动机每相绕组的磁链包括自感磁链和其他绕组对它的互感磁链,定转子六个绕组的磁链以矩阵表示为
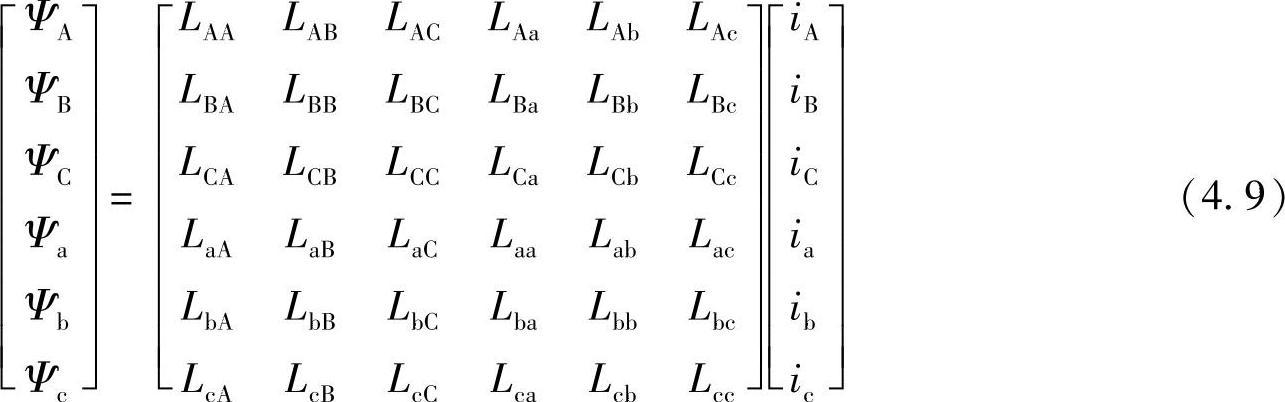
式中,ΨA、ΨB、ΨC、Ψa、Ψb、Ψc分别是通过定子和转子绕组的磁链。
式(4.9)或表示为
Ψ=Li (4.10)
相关文章

图13-18自动励磁调节器对功率特性的影响发电机装设自动励磁调节器后,当功角增大、UG下降时,调节器将增大励磁电流,使发电机电势Eq增大,直到端电压恢复(或接近)整定值UG0为止。为了定性分析调节器对功率特性的影响,用不同的Eq值,做出一组正弦功率特性族,它们的幅值与Eq成正比例,如图13-18所示。实际上,一般的励磁调节器并不能完全保持UG不变,因而UG将随功率P及功角δ的增大而有所下降。......
2025-09-29

梯级需要安装于梯级链轴上组成稳定的梯级联合体,在梯级链的牵引下,沿梯路导轨方向运行。因此,梯级与梯级链之间必须要有可靠的连接。但为了在日常维修中能方便地对梯级进行拆卸,梯级与梯级链之间的连接在结构上必须是相当简单的。但在套筒及梯级连接件中均加工有定位孔,并且在梯级连接件侧安装有定位弹簧销。......
2025-09-29

图2.28 调压调速和弱磁调速稳态参数关系虽然额定功率、额定电压和额定电流是电动机长期运行不能超过的,但是额定转速有一定的上调裕量,因此,采用弱磁升速可以扩大电动机的调速范围。即在调速范围要求较大的场合采取调压调速和弱磁调速相结合的方法,在额定转速以下采用调压调速,在额定转速以上采用弱磁调速,以扩大调速范围。......
2025-09-29

θmax从0.3054rad减小到0.2181rad,幅度为28.6%,脱扣电流则从1500A减小到1240A,幅度为17.3%;由图4-14,θ0从0.96rad减小到0.436rad,幅度为54.6%,脱扣电流则从1500A减小到890A,幅度为,由此可见改变同样大小的脱扣电流,调节θmax的方式所需的调节量比调节θ0的方式更大,并且从表4-3中还可看到脱扣电流随θ0的变化是非线性的。......
2025-09-29

跑道由混凝土层、碎石层、土基层构成,活性聚能侵彻体作用跑道时,产生压缩波,形成压缩区。图5.35活性聚能侵彻体侵彻跑道模型微元i开始侵彻靶板时,侵彻深度为Pi-1,则微元i到达目标的时间表述为对于活性聚能侵彻体,由于反应弛豫时间τ的存在,当ti≥τ时,侵彻结束,此时侵彻深度即Pi-1;当ti<τ时,侵彻继续进行。当考虑反射波的影响时,绝对侵彻速度按式~式计算;当考虑透射波的影响时,绝对侵彻速度按式~式计算。......
2025-09-29

经过建库以来几代管理者的科学、精心管理,陡河水库工程一直处于良好的运行状态。坝顶防浪墙修复及照明线路敷设工程的竣工为大坝安全度汛和紧急情况下大坝照明提供了有力保障。配电室电气更换工程的完工为陡河水库安全用电、紧急用电提供了切实的保障。陡河水库大坝实现了计算机远程控制、自动控制、人工控制,大坝安全监测系统达到了自动化,提高了现代化管理水平。......
2025-09-29
圆轴扭转时横截面上的最大工作切应力τmax不得超过材料的许用切应力[τ],即式称为圆轴扭转时的强度条件。对于等截面圆轴,从轴的受力情况或由扭矩图可以确定最大扭矩Tmax,最大切应力τmax发生于Tmax所在截面的边缘上。因而强度条件可改写为对于变截面杆,如阶梯轴、圆锥形杆等,Wt不是常量,τmax并不一定发生在扭矩为极值Tmax的截面上,这要综合考虑扭矩T和抗扭截面系数Wt两者的变化情况来确定τmax。......
2025-09-29
图2-14 JP-5000型高速火焰喷枪结构2.设备构成高速火焰喷涂设备一般由喷枪、送粉器、控制系统、喷枪冷却系统、气体供应系统五部分构成。用于高速火焰喷涂的粉末粒度一般为10~45μm,属于细粒度粉末。高速火焰喷涂时,首先应按照设备的规定要求确定氧气和燃气的流量,以保证喷枪焰流达到设计的功率水平。......
2025-09-29
相关推荐