图3.120清楚地表明,除了机器人在每次移动操作期间的自身负载外,还要移动机械手的质量。图3.120机器人手部法兰盘载荷的计算及手臂质量的图解对于图3.121所示的示例,红色标记的机械手重心和工件组合的重心超过了可承载的负载能力。一个1 kg重的机器人装载在这样的配置中,必须减少其负载以避免损坏。同时,制造商假定机械手能够可靠地保持其有效载荷,而不会在工件加速过程中失去抓取力。......
2025-09-29
异步电动机变频调速时,电压和频率之间有基频以下和基频以上的不同控制方式,这统称为电压频率的协调控制。不同的协调控制方法,异步电动机的性能也不同。
1.恒压频比控制(Us/ω1=常数)
在异步电动机的机械特性中,如图3.2所示,将同步转速和转速降以角频率ω1表示,分别为
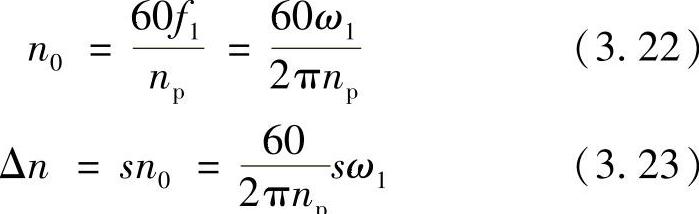
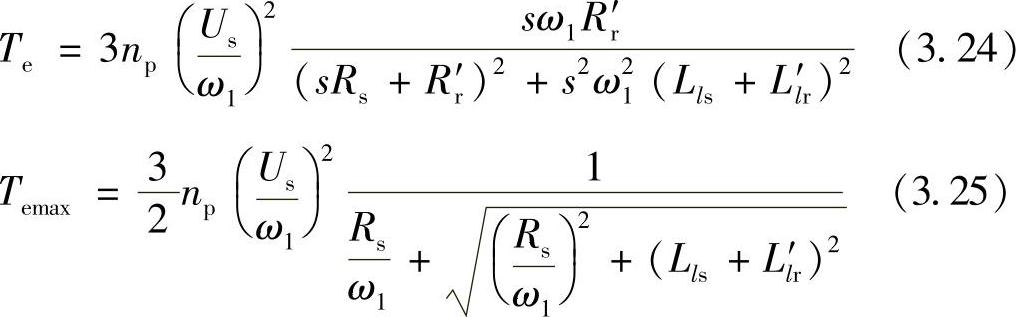
在0<s<sm时,s较小,忽略式(3.24)分母中的含s项,可以得到

式(3.26)表明,变频调速采用恒压频比控制时,因为Us/ω1为恒值,转差角频率sω1与转矩Te成正比,说明不同频率时,异步电动机若有相同转矩,它们的转差角频率sω1不变,即转速降Δn不变,因此它们机械特性的线性段是相互平行的。

图3.9 恒压频比控制机械特性
在式(3.25)中, 项随ω1减小而增大,说明在压频比不变控制时,电动机的最大转矩Temax将随频率下降而减小,频率越低Temax越小,这限制了低频时电动机的带载能力,需要采用定子压降补偿措施适当地提高电压Us,以提高Temax,增强电动机的带载能力。
项随ω1减小而增大,说明在压频比不变控制时,电动机的最大转矩Temax将随频率下降而减小,频率越低Temax越小,这限制了低频时电动机的带载能力,需要采用定子压降补偿措施适当地提高电压Us,以提高Temax,增强电动机的带载能力。
结合式(3.24)和式(3.18),可以画出恒压频比控制时变频调速系统的机械特性,如图3.9所示,随频率降低,电动机空载转速减小,机械特性基本上平行下移,并且最大转矩减小。
2.恒Eg/ω1控制
如果在电压频率协调控制中,恰当地提高Us电压的数值,使它在补偿定子阻抗压降后维持Eg/ω1为常数,则由式(3.20)可知,无论频率高低,每极磁通Φm均为常值。
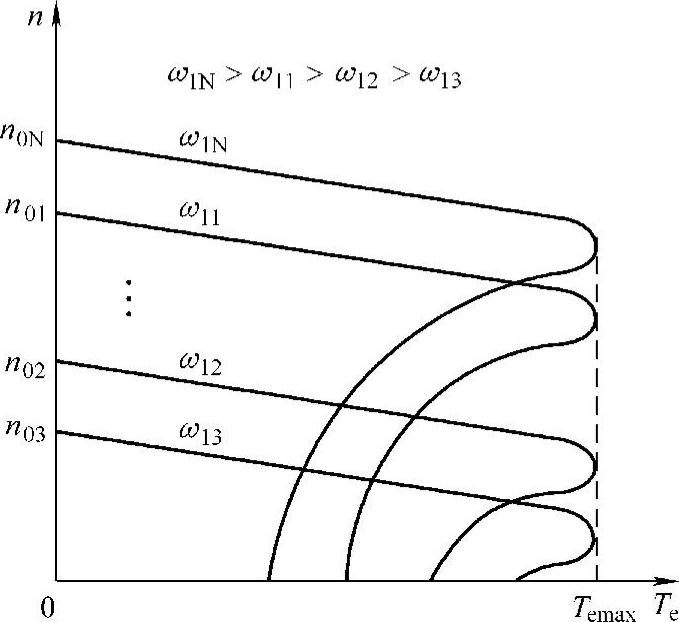
图3.10 恒Eg/ω1控制的机械特性
这时由等效电路(见图3.1b)得
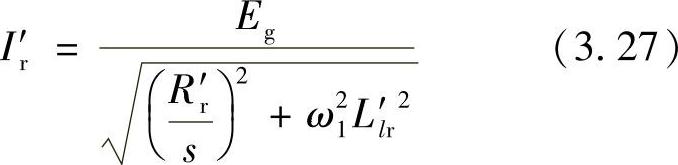
将式(3.27)代入电磁转矩方程[见式(3.15)],得

将式(3.28)对s求导,并令dTe/ds=0,可得恒Eg/ω1控制在最大转矩时的转差率和最大转矩为(https://www.chuimin.cn)


将式(3.31)代入式(3.15)可得

式(3.32)表明,在变频调速时,若保持Er/ω1=常数,转矩仅与转差频率sω1成正比,则这时的机械特性是一组平行直线,如图3.11所示。该特性与直流电动机调电枢电压的特性相同,因此若采取Er/ω1=常数的控制方式,异步电动机就能有与直流电动机一样良好的调速性能。然而,转子全磁链感应电动势Er是不能被直接检测和控制的,要实现Er/ω1=常数控制,定子电压不仅要补偿定子阻抗的压降,还要补偿转子漏抗的压降,这将在第4章矢量控制系统中介绍。
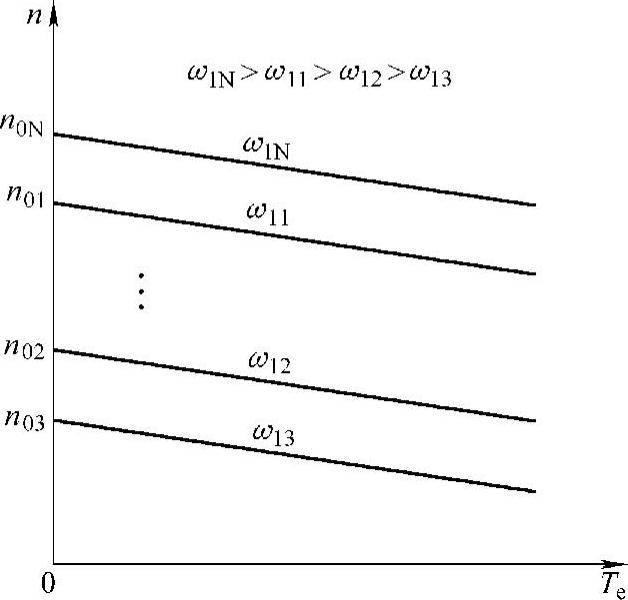
图3.11 恒Er/ω1控制的机械特性
4.基频以上恒压变频时的机械特性
在基频以上变频调速时,由于电压为额定电压(Us=UN)不变,将机械特性方程[见式(3.15)]和最大转矩方程[见式(3.16)]整理为

在基频以上,当角频率ω1提高时,电动机同步转速随之提高,但因为UN不变,最大转矩减小[见式(3.34)]。基频以上恒压变频调速的机械特性如图3.12所示。
5.四种变频控制方式的比较
恒压频比控制(Us/ω1=常数)最容易实现,其机械特性基本上是平行下移,硬度较好,能满足一般的调速要求,但其低速带载能力较差,需对定子阻抗压降进行补偿。
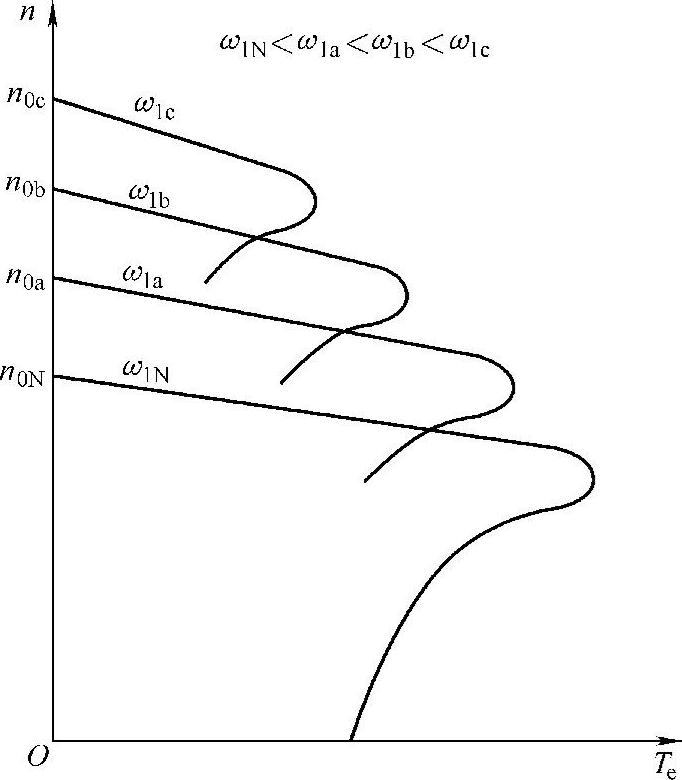
图3.12 基频以上恒压变频调速的机械特性
恒Eg/ω1控制是在恒压频比控制基础上对电压进行补偿,在稳态时保持Φm=恒值,改善了电动机低速性能,但机械特性还是非线性的,产生转矩的能力仍受到限制。
恒Er/ω1控制可以有与他励直流电动机一样的机械特性,在高、低速都有较大的负载能力,负载能力仅受电动机电流限制,但是实现比较复杂。
恒压频比控制、恒Eg/ω1控制和恒Er/ω1控制都是在基频以下调速,异步电动机气隙磁通不变,属于恒转矩调速方法。基频以上恒压变频调速时,由于频率提高而电压不变,气隙磁动势减弱,导致转矩也减小,但转速能高于额定转速,属于弱磁恒功率调速,这些与直流电动机调电枢电压调速的性质类似,可以参考图2.17。二者不同是,图2.17的橫坐标用转速表示,VVVF控制时橫坐标一般用频率f1表示。
以上机械特性都是在正弦波电压供电情况下分析的。如果采用变频器,其输出电压含有谐波,谐波将引起电动机转矩波动,并增加电动机的损耗。因此在设计变频装置时,应尽量减少输出电压中的谐波,尤其是低次谐波。
相关文章

图3.120清楚地表明,除了机器人在每次移动操作期间的自身负载外,还要移动机械手的质量。图3.120机器人手部法兰盘载荷的计算及手臂质量的图解对于图3.121所示的示例,红色标记的机械手重心和工件组合的重心超过了可承载的负载能力。一个1 kg重的机器人装载在这样的配置中,必须减少其负载以避免损坏。同时,制造商假定机械手能够可靠地保持其有效载荷,而不会在工件加速过程中失去抓取力。......
2025-09-29

三相异步电动机的机械制动,是在其切断三相交流电源后,利用机械装置强迫其立即停转。闸轮通过其轴与三相异步电动机的轴连接在一起,同步运行。当重物吊到一定高度时,若控制电路突然发生故障,使三相异步电动机断电停转,电磁制动器线圈也断电,闸瓦立即抱住闸轮使三相异步电动机迅速制动停转,从而可防止重物掉下造成事故。......
2025-09-29

表6-3 各种不同环境条件涂层厚度及封闭材料选择钢结构桥梁、电视塔钢结构等建筑,均采用喷锌、铝或锌铝合金长效防护涂层。德国洪格尔公司采用等离子喷涂陶瓷涂层技术生产活塞杆,长度可达20m,直径达1m,最大质量为15t。6)由于涂层的特殊结构,容易进行活塞杆行程位移传感自动控制与测量。图6-4 等离子喷涂Cr2O3陶瓷涂层活塞杆3.水轮机过流部件大型水电站水头落差大,水轮机过流部件长期承受河砂的冲蚀,产生磨粒磨损和气蚀。......
2025-09-29

图4-11 正确与错误的轴下切面a)错误 b)正确表面机械加工是另外一种表面预处理方法,常通过车削或磨削来完成。在热喷涂技术中,经常采用的表面机械加工方法有下切、开槽和平面布钉三种。将这道焊层机械加工成3.2mm的最小的肩,肩的直径应比轴的最后精加工尺寸大一些。3)使涂层生成起伏叠层,以控制内应力。......
2025-09-29

EOS StainlessSteel GP1这种材料是呈细粉状的预合金化不锈钢,它有很好的耐蚀性和机械性能,在激光作用下有极好的展延性,通常用于成形功能件、要求高耐蚀性和消毒性的工件,以及特别要求高韧性和展延性的工件。EOS CobaltChrome SP2这种材料是呈细粉状的钴—铬—钼基高温合金,它有极好的机械性能、耐蚀性和耐高温性,通常用于成形牙科修复物。图3-99~图3-101是激光烧结自由成形的金属件。......
2025-09-29
当系统频率略有下降时,负荷的有功功率成正比例自动减小。图中直线的斜率为或用标么值表示图6-2负荷的有功功率—频率静态特性曲线KD、KD*称为负荷的频率调节效应系数或简称为负荷的频率调节效应。在实际系统中KD*=1~3,它表示频率变化1%时,负荷有功功率相应变化1%~3%。KD*的数值是调度部门必须掌握的一个数据,因为它是考虑按频率减负荷方案和低频率事故时用一次切除负荷来恢复频率的计算依据。......
2025-09-29
转差频控制的基本思想是采用转子速度闭环控制,速度调节器通常采用PI控制。它的输入为速度设定信号和检测的电动机实际速度之间的误差信号,速度调节器的输出为转差频率设定信号。速度调节器的限幅值决定了系统的最大转差频率。因此,控制转差角频率可以实现对电磁转矩Te的控制,达到控制转速的目的。......
2025-09-29

在此基础上,基于此功能架构我们提出了一种实现多层资源优化跨无线、光和BBU层的全局评价方案,以保证QoS的要求。在第一阶段,GES可以根据全局评估因素在多层资源中选择最佳的目的地BBU。为了衡量业务供应选择的合理性,我们定义α作为考虑所有多层参数的全局评估因子。在BBU函数中,由于维度不同,很难对CPU和存储的利用率进行评估,为了测量BBU选择处理的合理性,可调整比例权重φ来调整其比例。......
2025-09-29
相关推荐