图4.14 转速、磁链闭环矢量控制系统仿真模型1.仿真模型图4.12所示带转矩内环的转速、磁链闭环矢量控制系统仿真模型如图4.14所示。图4.18 定子磁链轨迹图4.19 转矩-转速特性......
2025-09-29
例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。
转差频率控制的矢量控制系统仿真模型如图4.23所示。其中,逆变器和异步电动机与带转矩内环的转速、磁链闭环矢量控制系统模型相同(见图4.14),系统的控制部分由转速给定、PI调节器、转差频率计算、2r/3s坐标变换、电流滞环控制等环节组成。ASR输出是定子电流的转矩分量i∗st,定子电流的励磁分量i∗sm采用直接给定方式。转差频率计算模块Ws∗根据定子电流的励磁分量和转矩分量计算转差(ωs=ist/Trism),ωs与转子频率ω相加得到定子频率ω1,再经积分器得到定向角φ。dq0-to-abc模块用于2r/3s坐标变换,得到三相电流给定信号,然后经滞环控制Generation模块产生电流跟踪的PWM驱动脉冲,去控制逆变器。
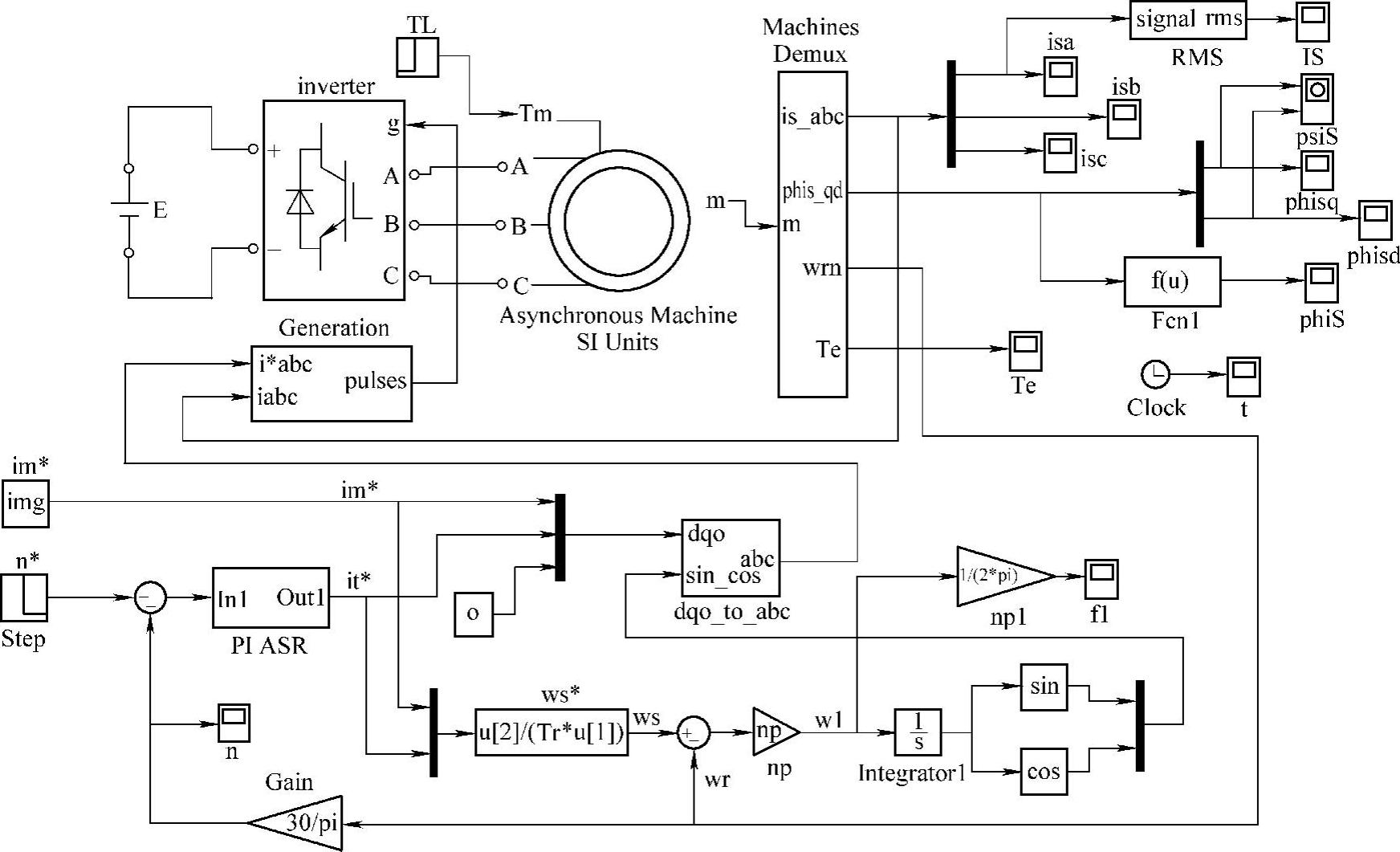
图4.23 转差频率控制的矢量控制系统仿真模型
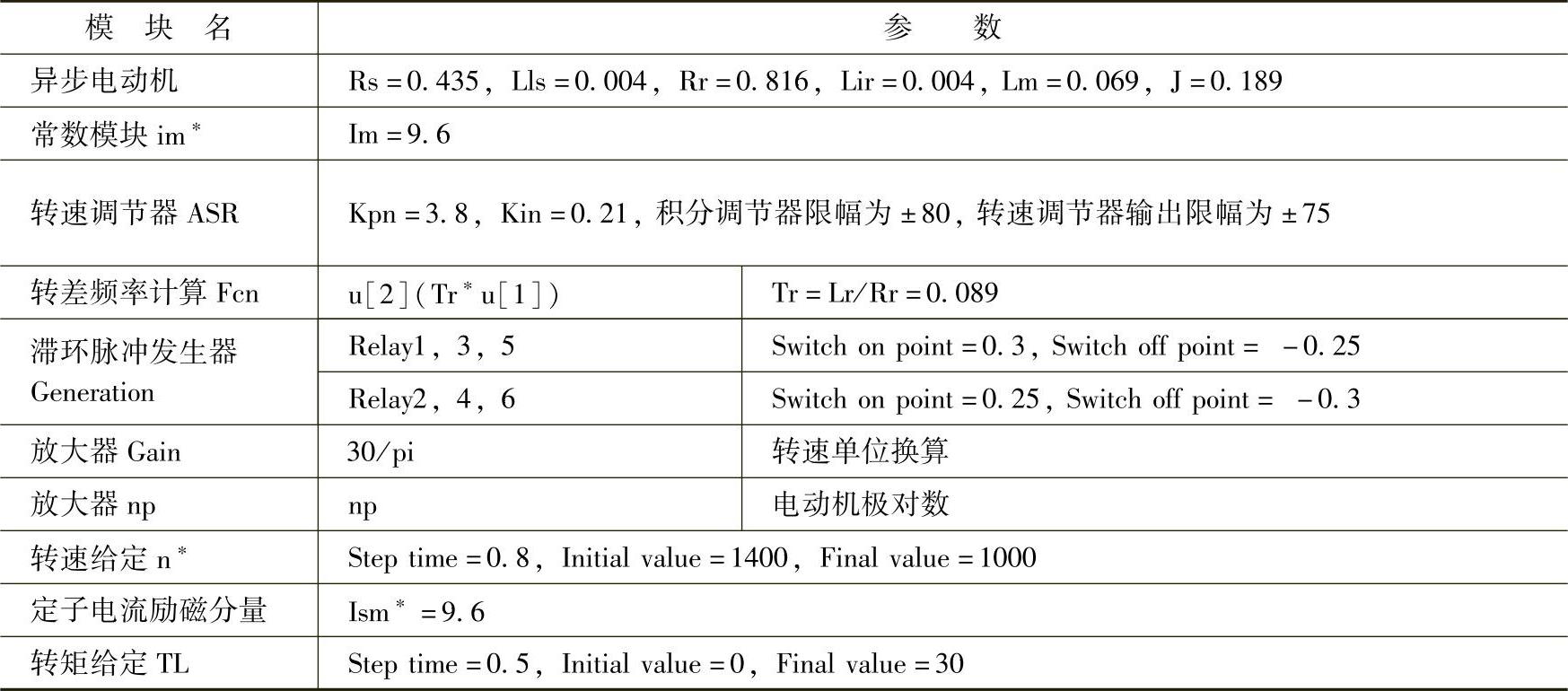
为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型(见例4.1)相同,ASR取值也相同,其他模块参数见表4.2。
表4.2 转差频率矢量控制系统的模块参数
电动机空载起动,在起动后1s加载TL=30N·m,起动时给定转速n∗为1400r/min时,1.2s后n∗降为1000r/min。模型仿真结果如图4.24所示。(https://www.chuimin.cn)
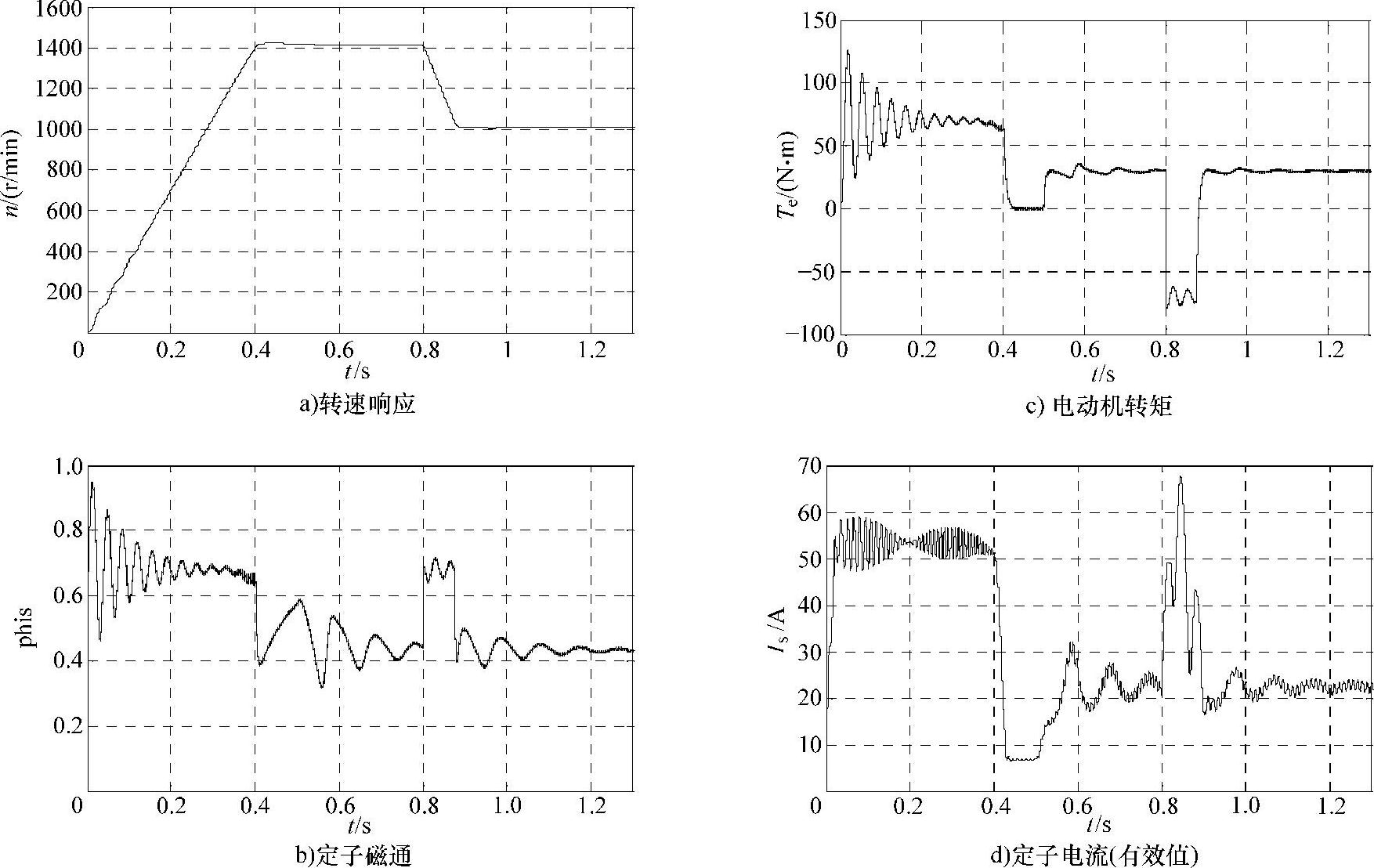
图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果
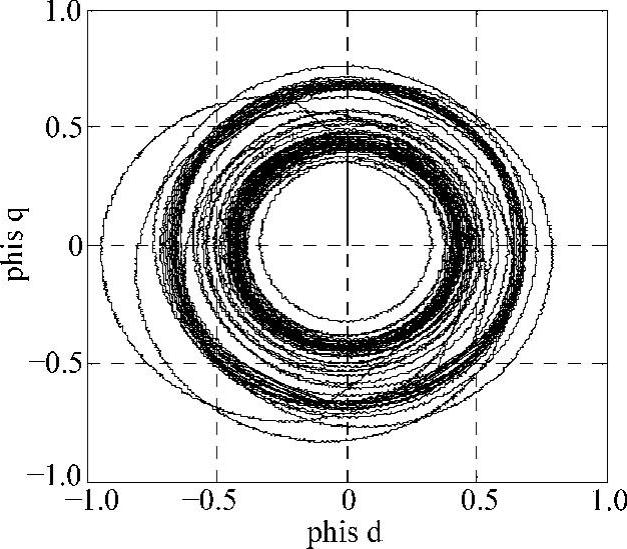
图4.25 定子磁链轨迹
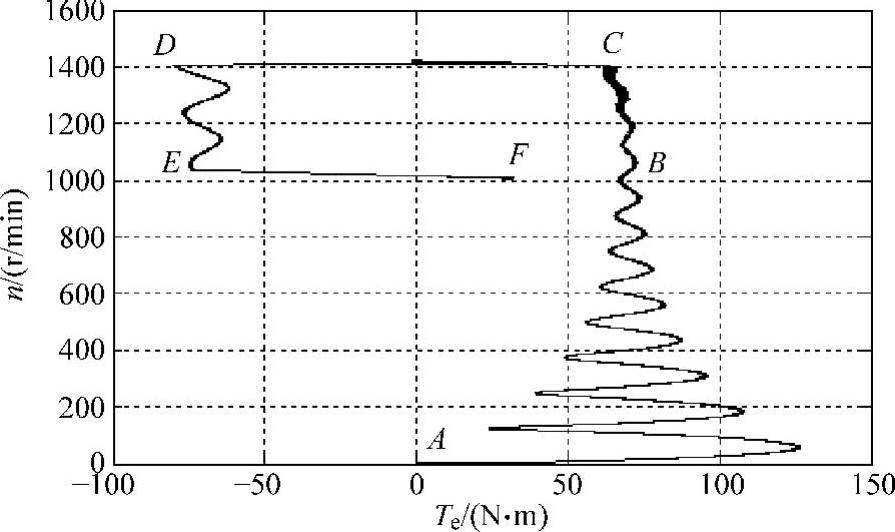
图4.26 转矩-转速特性
电动机转速波形(见图4.24a)反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。图4.24b为定子磁通响应,图4.24c和图4.24d分别是电动机的转矩响应和一相定子电流有效值波形,图4.25为定子磁链轨迹。与磁链闭环控制(见图4.12)比较,转速波形基本一致,起动中转速上升到1400r/min和下降到1000r/min的过程都比较平稳,加载对转速影响不大,但是开环控制磁链的波动比磁链闭环控制系统大,磁链的波动引起转矩和电流的波动也比闭环控制大,显然采用磁链闭环控制的效果要更好一些。磁链开环控制与闭环控制的效果也可以从磁链轨迹(见图4.18和图4.25)上反映出来。图4.26所示是电动机的机械特性,特性的起动阶段(ABC段)转矩是振荡衰减的,起动平均转矩在70N·m左右,在转速从1400r/min下降到1000r/min的过程中,特性进入到第Ⅱ象限,在特性的D-E段电动机处于回馈制动状态,制动结束后电动机稳定工作在1000r/min(F点),这和磁链闭环控制一样。异步电动机矢量控制与稳态模型的仿真比较表明,采用矢量控制的效果比在稳态模型基础上控制(见例3.1和例3.2)要好得多。
相关文章

图4.14 转速、磁链闭环矢量控制系统仿真模型1.仿真模型图4.12所示带转矩内环的转速、磁链闭环矢量控制系统仿真模型如图4.14所示。图4.18 定子磁链轨迹图4.19 转矩-转速特性......
2025-09-29

图4.12 采用电压型电流跟踪逆变器的带转矩内环的转速、磁链闭环矢量控制系统系统检测出异步电动机转速ω和三相电流后,由电流变换和磁链观测模块计算图4.12所示系统的定子电流的转矩分量ist、转子磁链Ψr和定向角φ,并按式计算电动机的转矩反馈信号Te。图4.13 采用SPWM逆变器的带转矩内环的转速、磁链闭环矢量控制系统......
2025-09-29

图4.8 二相静止坐标系上的转子磁链观测模型的计算框图2.按磁场定向的二相旋转坐标系上转子磁链观测模型根据矢量控制方程式和式可以得到在二相旋转坐标系上按转子磁链定向的转子磁链观测模型,如图4.9所示。图4.9 二相旋转坐标系上按转子磁链定向的转子磁链观测模型......
2025-09-29

图3.24所示的转速闭环转差频率控制的变频调速系统采用了交-直-交电压型电流跟踪逆变器,既是电压型逆变器又能对电流进行控制,综合了两种方式的优点。......
2025-09-29

由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2025-09-29

图3.29显示了定子磁链轨迹,磁链轨迹基本呈圆形,但是跟踪控制产生的电流毛刺使磁链轨迹不光滑。从磁链曲线比较恒压频比控制和转差频率控制的效果,差别是明显的,虽然二者都是按稳态模型控制,但转差频率控制在转速稳定后磁链的波动较小。......
2025-09-29
图8-12 SMCB工作原理图正常工作时,由于辅助电流回路限流电阻的存在,负载电流主要通过主电流回路;短路开断过程中,其限流性能主要是通过主动触头的快速打开后电流迅速向辅助回路转移,并依靠限流电阻的作用来实现。而当短路发生在SMCB和下级MCB之间时,主回路和辅助回路的双金属片均可能在短延时后动作,从而使机构解锁并实现短路分断。......
2025-09-29

Stage1.生成刀路轨迹Step1.进入区域切削模式。图3.5.10 “区域切削模式”对话框(一)注意:加工区域在“区域切削模式”对话框(一)中排列的顺序与选取切削区域时的顺序一致。此时“区域切削模式”对话框如图3.5.16所示,在下拉列表中选择选项,图形区中显示所有加工区域正投影方向下的刀路轨迹,如图3.5.17所示。图3.5.15 “往复切削参数”对话框图3.5.16 “区域切削模式”对话框(二)Step3.生成刀路轨迹。......
2025-09-29
相关推荐