快速更换托盘系统允许工件托架准备和装载与加工周期无关的工件。图4.81用机器人上的刀具加工工件布局的设计方式取决于工件。在机器人方面,根据ISO 9404,快换系统通常已经配备了一个法兰接口,与机器人的标准接口对应。图4.84符合ISO 9404和相应坐标系的机器人法兰盘为了更换整个装置,必须确保一个精确且可靠的分离点,以避免任何泄漏或接触错误。图4.85组件完整组链的说明......
2025-09-29
塑料网的挤出成型主要是因为特殊的机头结构。该机头有一对能够相对旋转的内外模面(口模),且分型面上还设置有数量和截面形状完全相同的半圆沟槽。当旋转或平移的内外模面移至两模面熔料流道汇合时,两根丝粘合到一起形成丝结(网结),当两模面熔料流道分开时又成为网丝。内外模面连续不断地旋转,丝、结循环变换则形成网格,再经过冷却定型就最后成型为圆形网筒。
图7-37a所示是圆筒网模成型网格、网结的示意图。图7-37b所示为圆筒网模成型后的结构图。图7-37c所示是平板网模的结构图,它是依靠开有小孔的两块上、下模板的平行左右移动来形成丝网的。
塑料挤出网按生产工艺过程可分为牵伸网与非牵伸网;按制品形式分为圆网(筒网)与平网(片网);按是否发泡可分为普通网和发泡网。通过变化各种因素(如模口小孔形状、数量、机头旋转速度和方向、配成各种颜色等),可以生产品种繁多、形状多变的各种塑料网。
这种塑料网由于无毒、省料、质量小、强度和韧性好、可做成各种颜色、并可一次成型且成型容易、工艺流程短、所用设备简单、易于操作、生产效率高、成本低、花色品种多、价格便宜,因此被广泛用作各种玩具、食品、蔬菜、酒类、机械零件的包装,在养蚕、家禽饲养、水产养殖、建筑等行业也得到广泛应用。
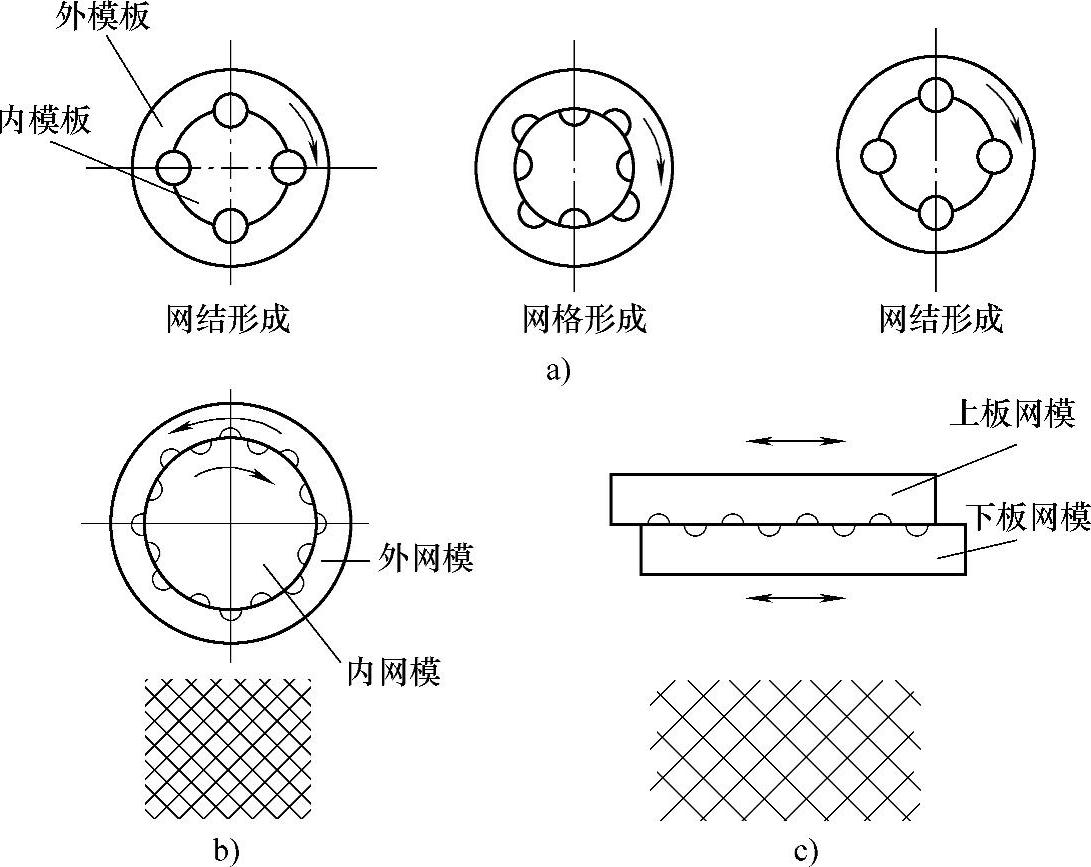
图7-37 塑料网的成型原理(https://www.chuimin.cn)
a)圆筒网模成型网结、网格示意图 b)圆筒网模结构 c)平板网模结构
塑料网常用原料主要是聚丙烯和聚乙烯,其中又以低密度聚乙烯用得较多。聚乙烯普通网可选用熔体流动速率为0.25~2g/10min的树脂,聚乙烯硬质平网可选用熔体流动速率为0.7~2.0g/10min的树脂。
聚乙烯发泡网是在聚乙烯挤出网的基础上发展起来的,可以用有机的AC或无机的NaHCO3作为发泡剂,经挤出发泡成网。
聚乙烯发泡网配方(质量份)如下:
LDPE(MFR为0.3),100;NaHCO3,8;聚丁二烯(物理交联剂),12。
相关文章

快速更换托盘系统允许工件托架准备和装载与加工周期无关的工件。图4.81用机器人上的刀具加工工件布局的设计方式取决于工件。在机器人方面,根据ISO 9404,快换系统通常已经配备了一个法兰接口,与机器人的标准接口对应。图4.84符合ISO 9404和相应坐标系的机器人法兰盘为了更换整个装置,必须确保一个精确且可靠的分离点,以避免任何泄漏或接触错误。图4.85组件完整组链的说明......
2025-09-29

LED芯片是被密封的,目的是实现机械保护和化学保护,密封材料还起到如前面所述的光学作用。有时透镜和密封材料是分开的,不存在光耦合,仅起到光束成形的作用。两个名词“透镜”和“密封材料”在原理上是指特性和作用不同的两部分。“透镜”用于改变光束的空间方向,而“密封材料”用于保护LED芯片并增强光提取。当分开的环氧树脂单体和固化剂在混合后发生聚合,则生成物被称为双组分。......
2025-09-29

食品包装用板(片)材用无毒卫生级PVC树脂。ABS板材原材料准备ABS板材应选用挤出板材用的专用树脂,即丙烯腈-丁二烯-苯乙烯共聚树脂。聚烯烃板材原材料准备 聚烯烃板材的挤出成型工艺比较简单,在挤出成型前无须进行干燥和造粒,原料染色后即可挤出成型。......
2025-09-29

前者从材料的单重电子能级发射光子,后者利用三重态能级的弛豫发光。当然,磷光器件的响应时间比荧光器件的更长,原因在于磷光材料三重态能级的弛豫。对于低分辨率无源矩阵显示器,荧光分子是更好的选择;而对于有源矩阵显示器和常规照明来说,应选择磷光材料。目前,磷光材料仍未能以聚合物的形式出现;只能用小分子产生蓝色磷光。图8-11 两种发光有机材料的能带图(上方)和效率(下方)......
2025-09-29

目前,塑料扁丝应用范围越来越广,几乎代替了所有天然织品,如麻织包装袋、棉织包装袋、帆布、地毯、墙纸、装饰用带等都采用塑料扁丝。塑料扁丝的应用领域和主要要求见表7-10。表7-10 塑料扁丝的应用领域和主要要求②用国产PP粉料挤出成型扁丝时,在树脂中要加入抗氧剂和氯离子吸收剂,以弥补原料热氧性能差和氧离子含量较高的不足。③如果扁丝长期在室外存放,则应使用加有抗紫外线助剂的树脂。......
2025-09-29

利用地理探测器进行交通事故分析,主要包括空间网格划分、因子探测、交互作用探测、生态探测等步骤。地理探测器在进行计算时,需要将数据离散化,进行分级。表3.8是纽约市曼哈顿区的交通事故风险单一因子探测的结果,可以发现,路网密度是决定交通事故发生数量的最主要因素,其次为交通设施密度。表3.11交通事故的生态探测结果......
2025-09-29

从顶部抓取称为力锁抓取,因为由加速度引起的剪切力或在工件上施加的水平力通过贴合摩擦传递。图3.20负压产生抓取力的原理图3.21真空抓取的部件当从下方抓住产品时,工件仅在重力作用下保持在抓取表面上。反向抓取可用于许多应用,因为它通常为产品提供最温和的抓取方法。图3.26用于抓取放置并带有传送带技术的反向抓取机械手吸附式和反向抓取机械手的这些示例足以证明抓取技术的多样性。......
2025-09-29

点焊机器人主要用于汽车整车的焊接工作,一般装配每台汽车车体大约需要完成3500~4500个焊点,而其中的80%是由机器人完成的。生产现场使用的点焊机器人的分类、特征和用途见表10-12。表10-12 点焊机器人的分类、特征和用途典型点焊机器人以持重为1000N,最高速度为4m/s的6轴垂直多关节点焊机器人为主。表10-13 点焊机器人的主要技术指标(续)......
2025-09-29
相关推荐