用于标准机械手的技术在过去30年中经历了显著的发展和差异化。图2.1清楚地显示了早期设计轻型抓手的困难程度。有限的控制技术能力也导致了明显的磨损迹象,机器人预计携带的有效载荷越多,设备的维护就越多。首先因为电动驱动器表现出与气动能源完全不同的行为;其次是因为它为抓取技术开辟了全新的可能性。这种类型的驱动器将极大地影响抓取技术的未来。......
2025-09-29
20世纪80年代之前,制造业制作工件的通常方法是采用体积大于工件的毛坯(原材料或铸造、锻压得到的坯料),通过车、铣、刨、钻、磨或电加工等工艺,切除毛坯上多余的材料形成工件。这种工艺属于减成制造法(简称减成法,Sub-tractive Fabrication),优点是工件精度高,可加工的原材料广泛,因此一直是制造业的主流工艺。
但是,减成法工艺也有明显的缺点:制作周期一般较长,成本较高,往往还需要制作模具的中间环节。随着社会的进步和科技的发展,产品的更新换代日新月异,减成法工艺难以缩短产品由设计到定型的过程。
20世纪80年代末期面世的快速成形(Rapid Prototyping,RP)工艺突破了减成法工艺的局限,采用堆积式自由成形(Free-Form Fabrication,FFF)技术,开创了加成制造法(简称加成法,Additive Fabrication)新工艺,它将计算机辅助设计(CAD)、计算机辅助制造(CAM)、计算机数字控制(CNC)、激光、精密伺服驱动等先进技术和新材料融为一体。实现加成法工艺的快速成形机可依据计算机构成的工件三维CAD设计模型(见图1-1a),首先用软件对设计模型进行分层切片,得到各层截面的二维轮廓图(见图1-1b),然后按照这些轮廓图进行分层自由成形,构成各个截面轮廓层薄片(见图1-1c,截面层厚度一般为0.05~0.20mm),并将这些薄片逐步顺序堆积成三维工件(见图1-1d)。
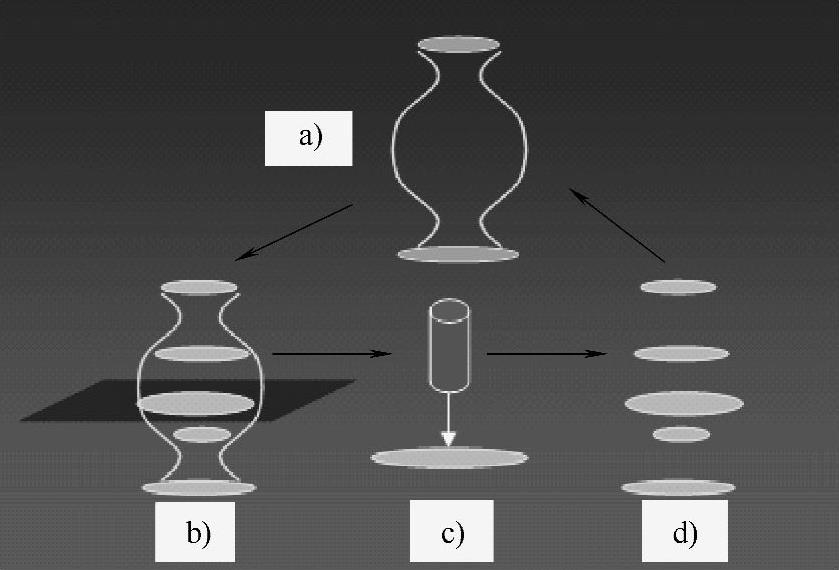
图1-1 工件的自由成形(三维—二维—三维的转换)(https://www.chuimin.cn)
a)三维设计模型 b)模型分层切片 c)分层成片 d)堆积成体
自由成形将复杂的三维加工转化成简单的二维加工的组合,不必采用传统的加工机床和工模具,一般只需传统加工方法30%~50%的工时和20%~35%的成本,就能直接制造出产品样品(原型件)或模具。由于自由成形具有上述突出优点,近20年来发展迅速,自由成形产品销售和服务总额的年平均增长率高达26.4%,自由成形已成为现代先进制造技术中的一项支柱技术。
上述情况表明,针对由原材料至成品的整个工艺过程来看,自由成形节省了制作工模具的时间,因此可称其为“快速成形”。但自由成形工艺的核心是逐层制作薄片和层层堆积,这些工序本身比较费时,与减成法相比并非“快速”。基于这个原因,本书为避免误导,将这种加成制造法称为“自由成形”,或照顾到过去的习惯称为“自由快速成形”,而不称为“快速成形”。
相关文章

用于标准机械手的技术在过去30年中经历了显著的发展和差异化。图2.1清楚地显示了早期设计轻型抓手的困难程度。有限的控制技术能力也导致了明显的磨损迹象,机器人预计携带的有效载荷越多,设备的维护就越多。首先因为电动驱动器表现出与气动能源完全不同的行为;其次是因为它为抓取技术开辟了全新的可能性。这种类型的驱动器将极大地影响抓取技术的未来。......
2025-09-29

机床电器控制是随着科学技术的不断发展以及生产加工工艺不断改进而不断更新的。随着新的控制理论和电器及电子元器件的出现,还将不断地推动机床电器控制继续向前发展。到了20世纪40~50年代,交磁电机扩大机-电动机控制闭环反馈系统的出现,使机床电器控制系统的控制精度、快速响应性能都有了提高。......
2025-09-29

19 世纪末至20 世纪初先后发明了无烟火药和硝化棉、苦味酸、梯恩梯等猛炸药并应用于军事, 它们是弹药发展史上的一个里程碑。随着飞机、坦克投入战斗, 航空弹药和反坦克弹药得到发展。战场成为交战国家高新技术武器弹药的试验场。......
2025-09-29
美国沃特公司研制生产的M270 式多管火箭炮系统, 于1983 年正式装备美国陆军。2011 年8 月, 洛克希德·马丁公司试验结果显示, 加装远程发动机的GMLRS + 制导火箭弹的射程可达120 km。火箭弹在弹道主动段终点达到最大速度。......
2025-09-29

由于这种曲射火炮具有优势, 各国开始重视迫击炮的研制和发展。第二次世界大战以来, 随着科学技术的进步, 迫击炮的发展日趋成熟, 迫击炮的性能得到较大提高。迫击炮弹是伴随着迫击炮的发展而发展的。迫击炮弹由早期的近程超口径长炮榴弹逐渐发展为适口径多弹种的弹药。......
2025-09-29

图3.103工件无序堆放在料框中对于不断增长的工件多样性,以经济有效的方式对临时存储进行分类几乎是不可能的。图3.104在抓取工件时应考虑机械手/吸附装置的干涉轮廓在工件未分拣但在单个层面上可接近的情况下,抓取的可接近性比在箱中更好。图3.107抓取范围中干涉轮廓问题的说明当使用一个搬运系统时,工件的放置通常会发生在一个分拣的场景里,使用对于工件来说最轻柔的方式进行搬运。......
2025-09-29


相关推荐