(一)凸轮机构的组成、功用及分类凸轮机构在纺织机械中应用相当广泛。通过凸轮运动曲线的设计,可以达到所要求的各种运动方案,并且结构紧凑。凸轮机构是主要由凸轮、从动件和机架组成。图2-23盘状凸轮机构按凸轮的形状分,凸轮可分为盘形凸轮、圆柱凸轮和移动凸轮,如图2-24 所示。(二)纺织机械中从动件运动规律的选择1.凸轮机构运动线图 从动件的运动规律是指从动件的位移、速度、加速度随凸轮转角的变化规律,如图2-25 所示。......
2025-09-29
向机构装置中增加伺服电动机后,便可建立机构的运动分析(定义)并运行。
在每个运动定义中,可选择要打开或关闭的伺服电动机并指定其时间周期,以定义机构的运动方式。虽然可为一个图元定义多个伺服电动机,但一次只能打开图元的一个伺服电动机,例如为一个图元创建了一个连接轴伺服电动机和一个平面—平面旋转角度伺服电动机,则在相同的运行时间框架内不要同时打开这两个伺服电动机。
在“分析定义”对话框中,利用“锁定的图元”区域的命令按钮,可选取主体或连接进行锁定,这样当运行该运动定义时,这些锁定的主体或连接将不会相互移动。
可以创建多个运动定义,每个定义都使用不同的伺服电动机和锁定不同的图元。根据已命名的回放次序保存每个定义,便于以后查看。
下面以实例说明运行运动的一般过程。
Step1.选择下拉菜单 命令。
命令。
Step2.此时系统弹出图9.5.64所示的“分析定义”对话框,在该对话框中进行下列操作:
(1)输入此分析(即运动)的名称。在“分析定义”对话框的“名称”文本框中输入分析名称,或采用默认名。
(2)选择分析类型。选取此分析的类型为“位置”。
(3)调整伺服电动机顺序。如果机构装置中有多个伺服电动机,可单击对话框中的 标签,在图9.5.65所示的选项卡中调整伺服电动机顺序。由于本例中只有一个伺服电动机,所以不必进行本步操作。
标签,在图9.5.65所示的选项卡中调整伺服电动机顺序。由于本例中只有一个伺服电动机,所以不必进行本步操作。
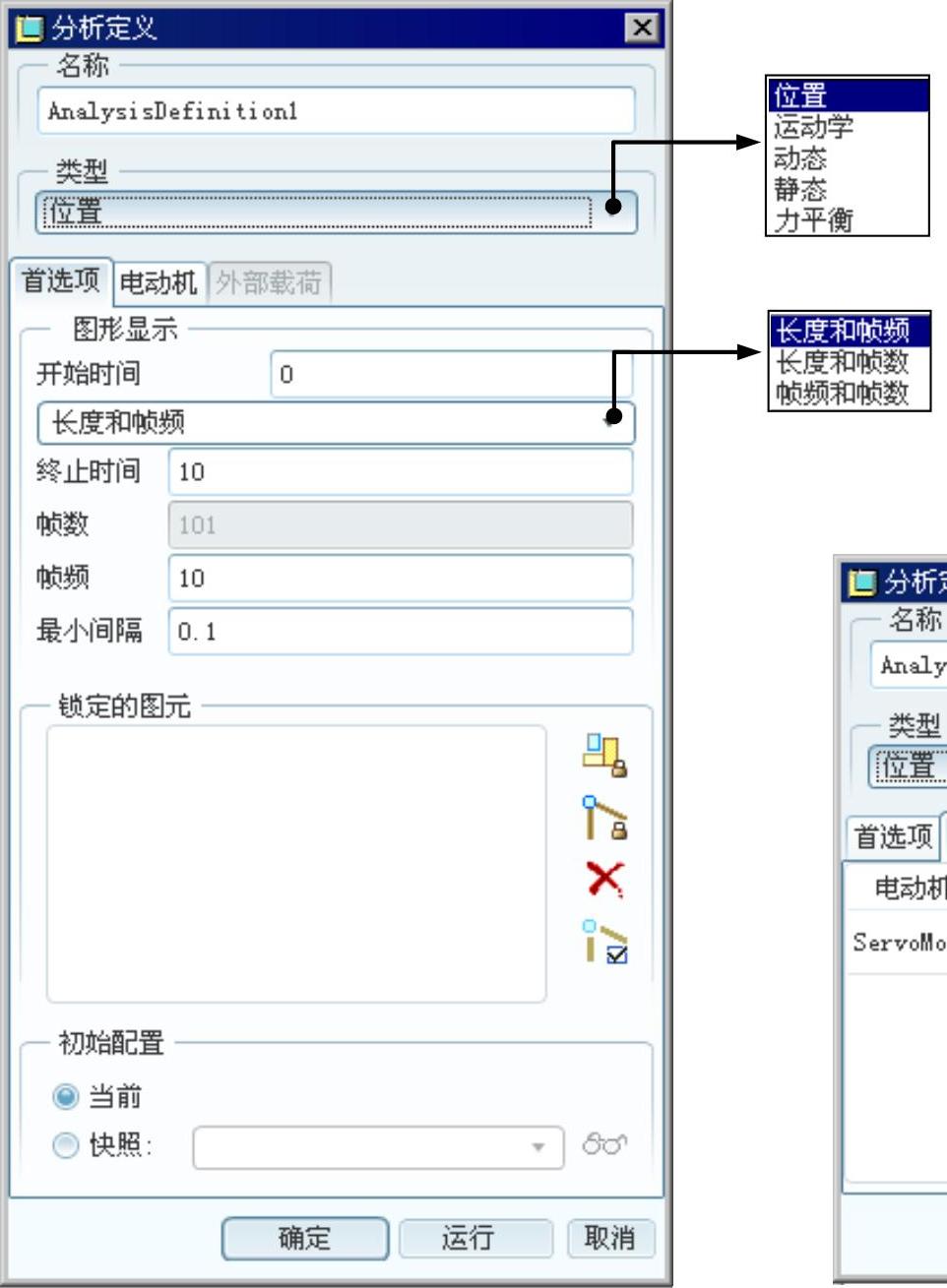
图9.5.64 “分析定义”对话框
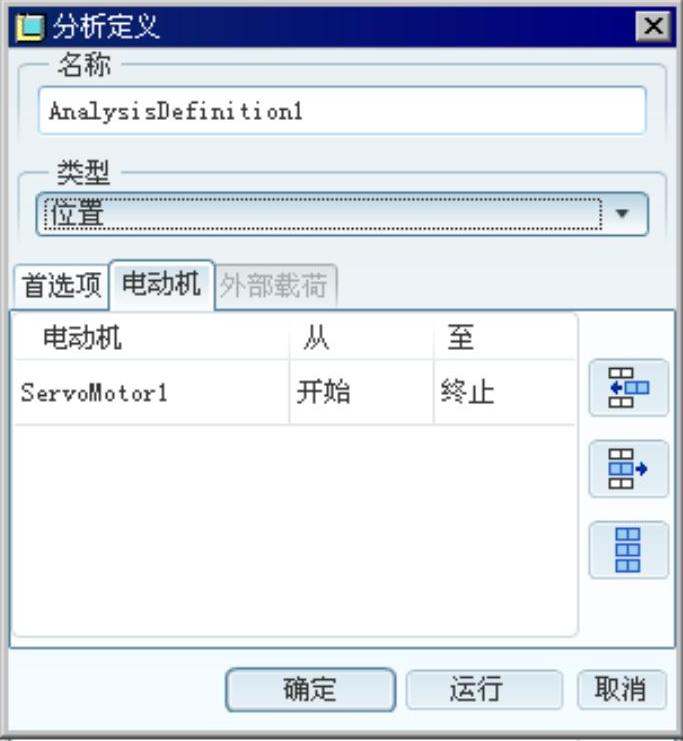
图9.5.65 “电动机”选项卡
(4)定义动画时域。在图9.5.64所示的“分析定义”对话框的 区域进行下列操作:
区域进行下列操作:
①输入开始时间:0(单位为秒)。
②选择测量时间域的方式。在该区域的下拉列表中选择 。(https://www.chuimin.cn)
。(https://www.chuimin.cn)
③输入终止时间:1(单位为秒)。
④输入帧频:100。
注意:
● 测量时间域的方式有三种:
① :输入运行的时间长度(结束时间-开始时间)和帧频(每秒帧数),系统计算总的帧数和运行长度。
:输入运行的时间长度(结束时间-开始时间)和帧频(每秒帧数),系统计算总的帧数和运行长度。
② :输入运行的时间长度和总帧数,系统计算运行的帧频和长度。
:输入运行的时间长度和总帧数,系统计算运行的帧频和长度。
③ :输入总帧数和帧频(或两帧的最小时间间隔),系统计算结束时间。
:输入总帧数和帧频(或两帧的最小时间间隔),系统计算结束时间。
● 运行的时间长度、帧数、帧频和最小时间间隔的关系:
帧频=1/最小时间间隔。
帧数=帧频×时间长度+1。
(5)进行初始配置。在图9.5.64所示“分析定义”对话框的 区域,选中
区域,选中 单选按钮。
单选按钮。
注意:
● 当前:以机构装置的当前位置为运行的初始位置。
● 快照:从保存在“拖动”对话框中的快照列表中选择某个快照,机构装置将从该快照位置开始运行。
Step3.运行运动定义。在图9.5.64所示的“分析定义”对话框中,单击 按钮。
按钮。
Step4.单击对话框中的 按钮,完成运动定义。
按钮,完成运动定义。
相关文章

(一)凸轮机构的组成、功用及分类凸轮机构在纺织机械中应用相当广泛。通过凸轮运动曲线的设计,可以达到所要求的各种运动方案,并且结构紧凑。凸轮机构是主要由凸轮、从动件和机架组成。图2-23盘状凸轮机构按凸轮的形状分,凸轮可分为盘形凸轮、圆柱凸轮和移动凸轮,如图2-24 所示。(二)纺织机械中从动件运动规律的选择1.凸轮机构运动线图 从动件的运动规律是指从动件的位移、速度、加速度随凸轮转角的变化规律,如图2-25 所示。......
2025-09-29

本节主要内容是指导用户如何把顺序控制梯形图程序转换成FB程序,同时确保程序实现的功能不变。图7-64 FB定义程序的新建3)如图7-65所示步骤双击鼠标,进入标签登录画面。图7-70 进入程序主单元顺序控制程序的编写按图7-72所示内容,编写带有FB的顺序控制程序,其编程方法与顺序控制梯形图程序的操作相同。......
2025-09-29

机械中常用的间歇运动机构有凸轮机构、连杆机构、组合机构、液( 气) 压传动控制的机构、棘轮机构、槽轮机构、不完整齿轮机构等。间歇运动机构工作时,一般应满足以下要求: 运转过程中平稳无冲击。......
2025-09-29

建立操作机构仿真模型的最简便的方法是从常用的三维实体造型软件中导入,如从SolidWorks、UG和Pro/E等建立的实体模型完整地导入到ADAMS软件,中间文件格式最好的是Parasolid,以*.x_t和*.xmt_txt文件名导入,断路器操作机构的结构比较复杂。考虑到所关心的问题和仿真的方便,对其作适当简化,将从UG等三维软件导入的低压塑壳断路器操作机构和触头系统的模型进行了删减,在ADAMS/View中重新建立了关键构件的模型,其主要由连杆机构组成。......
2025-09-29

表8.4折弯机外负载和液压缸工作压力运动分析根据给定条件可知:空载快速下降行程180 mm,速度23 mm/s;慢速折弯行程20 mm,其中在开始15 mm 的初压段等速运动,速度为12 mm/s,最后5 mm 的终压段速度均匀地减至零;快速回程以53 mm/s 的速度上升。图8.4折弯机负载循环图图8.5折弯机速度循环图......
2025-09-29

x、y 均为时间t 的单值连续函数,即式称为点的直角坐标表示的运动方程。将不同瞬时的t 值代入直角坐标表示的点的运动方程,求出相应的坐标值,即确定了各瞬时点在空间的位置,将它们连接成光滑曲线,即可得到动点的运动轨迹。此外,还可以消去式中的参变量t,得到两坐标间的函数关系这样,也可得到动点的轨迹方程。试求当OA 杆按φ=kt 的规律转动时,点m 的运动方程和轨迹方程。列直角坐标表示的M 点的运动方程。求点M 的轨迹方程。......
2025-09-29

表4.4不同类型的运动关节及其工作空间所有运动学由于其设计,也由于其加工区域几何结构,表现出不同的特定运动特性。图4.53不同类型的笛卡儿轴系统配置图4.54所示为塑料部件自动装置系统中的笛卡儿搬运系统。与完全标准的运动关节相比,这个市场在统计上更难表现出来。图4.57同一家制造商提供的不同关节臂运动关节当连接多个轴时,很明显,串行轴的精度,即连续连接的轴,对整个系统有重大影响。......
2025-09-29
(二)机构运动特性1.共轭凸轮打纬机构的特点 筘座有相当长的静止时间,可供纬纱飞行更长时间,对纬纱的作用更为柔和,为高速、宽幅引纬提供了有利条件。......
2025-09-29
相关推荐