图6.13 同步电动机空间矢量关系1.气隙磁场定向不考虑阻尼绕组的同步电动机空间矢量关系如图6.13所示。图6.13中建立了两个旋转直角坐标系,其中dq坐标系的d轴与转子励磁Ψf方向重合,mt坐标系的m轴与气隙磁链Ψδ方向重合,即按气隙磁链Ψδ方向定向。定子电流is在mt坐标系轴上投影分别为ism、ist,励磁电流在mt坐标系轴上投影分别为ifm、ift。......
2025-09-29
1.双馈发电机的数学模型
双馈发电机的数学模型与异步电机数学模型相同。在第4章中讨论的异步电机数学模型具有一般性,无论是三相模型还是二相模型[见式(4.49)],既适用于笼型异步电机也适用于绕线转子异步电机(双馈异步电机),并且既适用于电动机也适用于发电机。但是在建立异步电机数学模型时,定子电流的正方向是按电动机的惯例设定的,以定子电流流入为正方向,在发电机时定子电流为负方向而已。况且,交流电本无方向问题,有的只是电压与电流的相位关系问题。另外,在风力发电系统中,不同之处还有三相/二相变换时常采用的按幅值相等原则,由于变换后发电机二相模型每相电压和电流与三相发电机每相电压和电流幅值相等,因此,以二相模型计算的双馈发电机功率应增加3/2倍,转矩也应增加3/2倍。双馈发电机定子的有功功率和无功功率为

式(8.11)中,无功功率Q1为d轴电压usd、电流isd和q轴电压usq、电流isq的交叉乘积之和。
双馈发电机的转矩方程为

2.按定子磁链定向控制
异步电机在同步旋转dq坐标系上的模型有按转子磁链定向、定子磁链定向和气隙磁链定向等多种方法,在双馈发电机中常采用按定子磁链定向控制的方法,这样可以简化功率的计算。按定子磁链定向的同步旋转dq坐标系如图8.10所示。dq坐标系的d轴定向在定子磁链Ψs方向上,因此

由式(8.13)可得
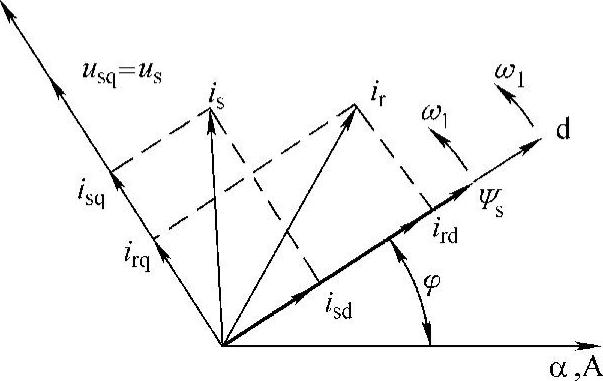
图8.10 按定子磁链定向的同步旋转dq坐标系
由于定子电压合成矢量 ,定子相电压us领先磁链Ψs为90°,因此按定子磁链定向后
,定子相电压us领先磁链Ψs为90°,因此按定子磁链定向后

由式(4.49),在忽略定子电阻Rs时,同步旋转dq坐标系上按定子磁链定向的定子电压方程为
usd=Lspisd+Lmpird+Rsisd-ω1(Lsisq+Lmirq)=Lspisd+Lmpird=0
usq=ω1Lsisd+ω1Lmird+Rsisq+p(Lsisq+Lmirq)=us(https://www.chuimin.cn)
因此按定子磁链定向,双馈发电机在同步旋转dq坐标系上的方程为

由式(8.16)第2行us=ω1(Lsisd+Lmird)=ω1Ψs, ,在定子并网时,电网us和ω1都不变,因此pΨs=0,Ψs是恒定不变的。
,在定子并网时,电网us和ω1都不变,因此pΨs=0,Ψs是恒定不变的。
将式(8.14)、式(8.15)代入式(8.11)可得,在按定子磁链定向后
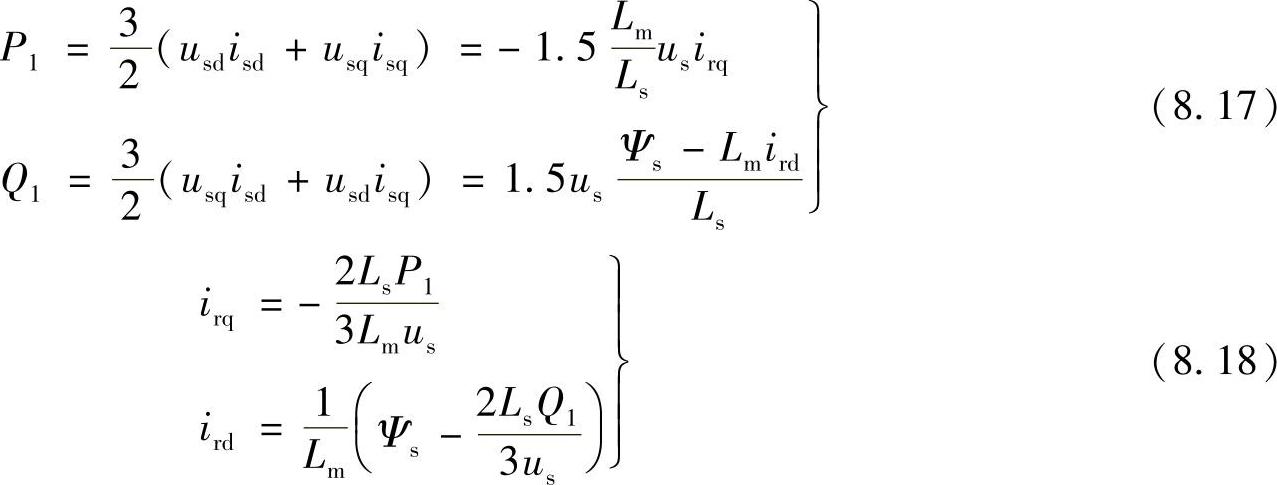
式(8.18)表明,双馈发电机并网后,因为电网电压us恒定,Ψs也是恒定的,定子有功功率P1仅与转子励磁电流q轴分量irq有关,定子无功功率Q1仅与转子励磁电流d轴分量ird有关,控制ird和irq就可以控制定子的有功功率和无功功率。
由式(8.16)的转子电压方程和式(8.14)的电流方程可得

式中
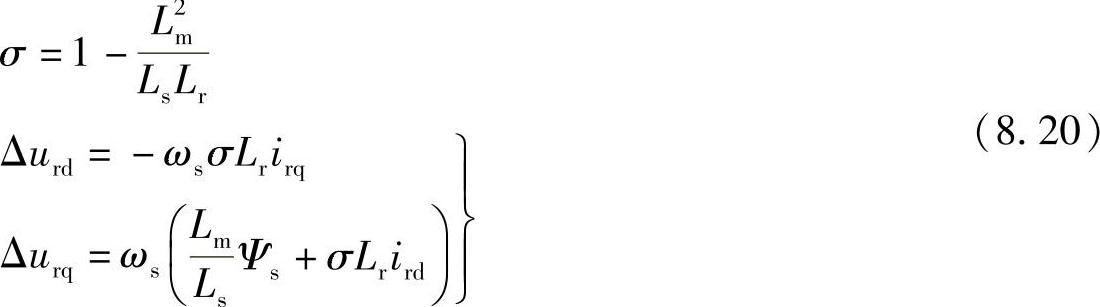
式(8.19)等号右边,前两项为实现转子电压、电流解耦控制的解耦项,Δurd、Δurq为消除转子电压与电流交叉耦合的补偿项,将转子电压分解为解耦项和补偿项,既可以简化控制又可以保证控制的准确度和动态响应的快速性。
3.定子磁链观测
在二相静止坐标系上,定子磁链分量为

定子磁链的幅值Ψs和方向角θs为

相关文章

图6.13 同步电动机空间矢量关系1.气隙磁场定向不考虑阻尼绕组的同步电动机空间矢量关系如图6.13所示。图6.13中建立了两个旋转直角坐标系,其中dq坐标系的d轴与转子励磁Ψf方向重合,mt坐标系的m轴与气隙磁链Ψδ方向重合,即按气隙磁链Ψδ方向定向。定子电流is在mt坐标系轴上投影分别为ism、ist,励磁电流在mt坐标系轴上投影分别为ifm、ift。......
2025-09-29

图1.35 转速电流闭环控制系统静特性3.转速和电流反馈系数的整定双闭环调速系统转速和电流反馈系数是系统调试时必须要整定的两个参数。......
2025-09-29

位置伺服控制系统必有位置检测和位置控制器,位置控制器输出用于控制电动机,对于电动机又有转速开环和闭环控制,因此对于直流位置伺服控制系统,基本结构有:1)位置环+电枢调压调速。在各种位置闭环伺服控制系统中位置环是共有的,位置环内包含了电动机转速调节系统的等效传递函数和减速器和传动机构的传递函数,如图7.14所示。位置单闭环控制频带宽,响应快,一般用在小功率伺服系统中。......
2025-09-29
与工业和社会中新兴的大趋势一样,通过过去几年的发展,抓取和搬运技术的未来也可以被许多因素影响。图5.1没有防护栅栏的人机协作汽车制造商和其行业供应商即使作为已经高度自动化的工业领域,一方面由于汽车厂数量的增长,另一方面在质量和高成本的压力下,也会促使搬运技术迎来持续不断的销售增长,本书前面提到的机器人的销售统计数据清楚地证实了这种现象。......
2025-09-29

PLC与继电器控制的主要区别有以下几点:1.组成器件不同继电器控制电路是由许多真正的硬件继电器组成的。又因PLC是通过循环扫描工作的,不存在继电器控制电路中的联锁与互锁电路,控制设计大大简化了。而在PLC的梯形图中,各“软继电器”都处于周期性循环扫描接通中,从客观上看,每个“软继电器”受条件制约,接通时间是短暂的。也就是说继电器在控制的工作方式是并行的,而PLC的工作方式是串行的。......
2025-09-29

图1.33反映了双闭环控制后转速和电流在起动时的响应过程。转速电流双闭环控制系统的抗扰能力与转速单闭环控制系统的不同之处是,由于增加了电流控制环,对于被电流环包围的前向通道上的扰动,电流环有直接抑制的作用,而不必待这些扰动引起转速变化后,才由转速环对之产生抑制,因此双闭环控制系统较转速单闭环控制系统有更强的抗扰能力。......
2025-09-29

我们每天都在成百上千次地搬运东西,“搬运”这个动作已经成为我们日常生活的一部分。在生产中,每次当工件被转移、储存、传输或组装时,都会发生搬运的动作。搬运任务的自动化是众多可用设计解决方案中的一种。本章介绍了对于当代搬运工序中可用自动化组件的基本理解。本章也审视了搬运技术的发展和在工业生产的所有领域中发展的源动力,它对于阐述此项技术未来发展的驱动力和得到未来组件发展的蓝图有所帮助。......
2025-09-29
弹道导弹具有较强的修正能力, 弹道导弹的射击方向与发射装置和目标点之间的连线方向重合即可, 导弹飞行中控制系统将其严格控制在发射平面内直至命中目标。基于以上5 方面的原因, 无法将弹道摄动理论直接挪用到弹道修正火箭弹上。......
2025-09-29
相关推荐