图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29
系统的稳定性和稳态特性的含义是不同的,稳定性是系统状态变化(给定和扰动)后,经过调整能否使输出重新稳定的能力,稳态特性是系统输出转速稳定后,转速与转矩或者说负载之间的关系。反馈控制系统的稳定性是系统能正常工作的前提条件,研究系统的稳定性,首先要建立系统的动态数学模型,然后根据稳定性判据判别系统的稳定性,在稳定性不足时采取一定的校正措施,使系统获得良好的动、静态性能。
有静差调速系统由调节器、变流器、电动机和测速等环节组成,以传递函数表示各环节即组成系统的动态结构图,也称数学模型。转速反馈有静差调速系统动态结构图如图1.17所示。
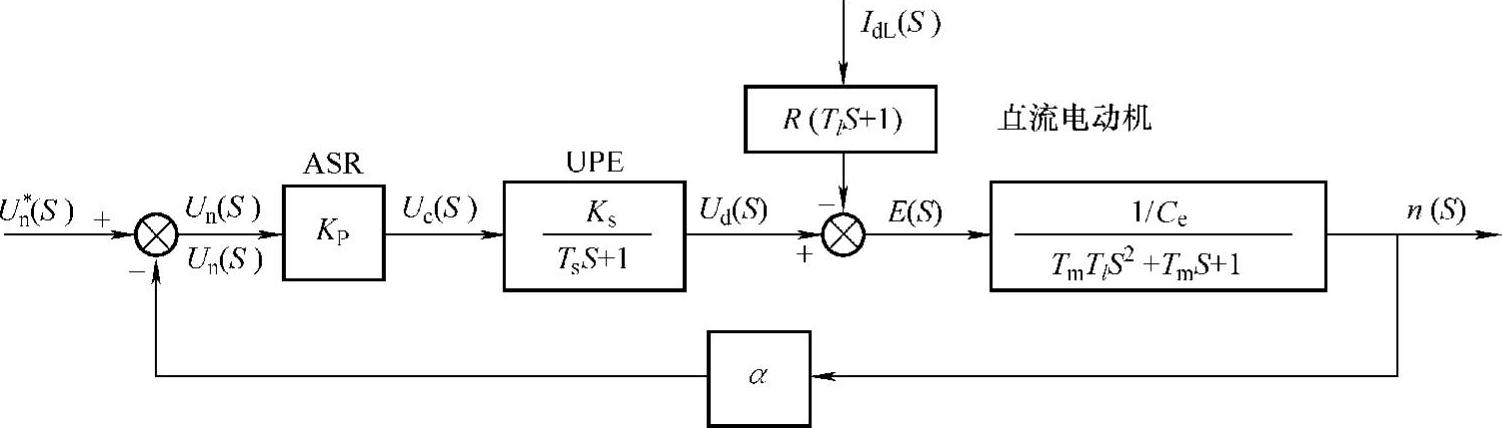
图1.17 转速反馈有静差调速系统动态结构图
在系统动态结构图中,若将负载折算的电流IdL看成是一种扰动,在系统稳定性分析时暂不考虑,即令IdL=0,则从图1.17可以直接得到采用比例调节器的转速反馈调速系统的开环传递函数

式中,K为闭环系统的开环放大倍数
K=KPKsα/Ce (1.30)
从开环传递函数可以得到系统的闭环传递函数
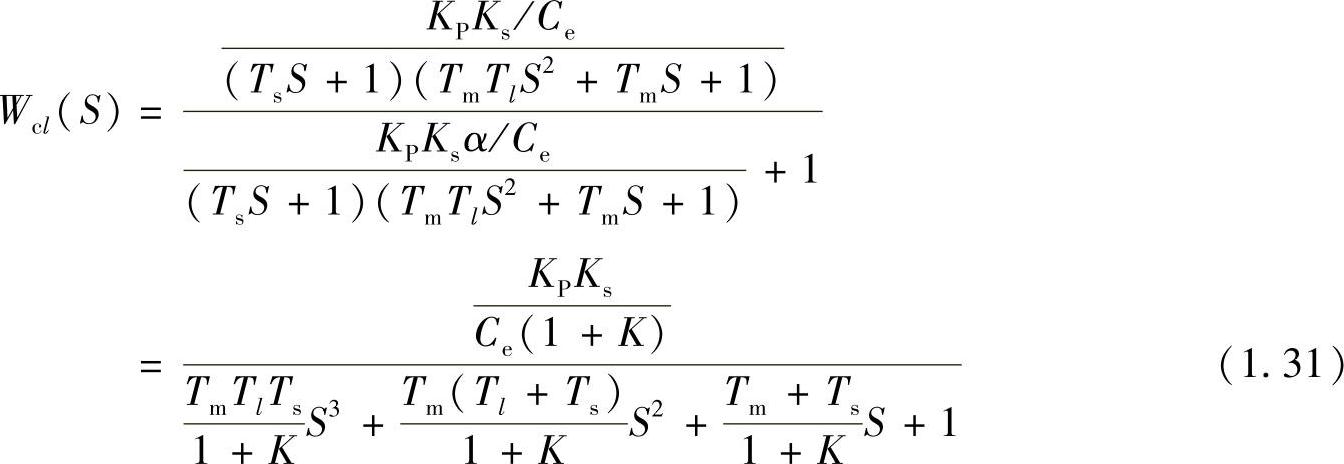
系统闭环传递函数的特征方程为
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
在已知特征方程的基础上可以用代数判据(劳斯-赫尔维茨判据)得到系统的稳定条件。
三阶系统特征方程的标准形式为
a0S3+a1S2+a2S+a3=0稳定条件为a0>0,a1>0,a2>0,a3>0,a0>0,a1a2-a0a3>0
因为式(1.32)中各项系数都大于0,因此系统稳定还需要的条件是

整理得

令

Kcr称为系统的临界放大倍数,当系统的放大倍数K≥Kcr时系统将不稳定。因此系统设计时,既要使放大倍数K满足稳态指标(D,S)的要求,还要校核放大倍数K,看其是否满足系统稳定性的要求。由式(1.30),K=KPKsα/Ce,其中Ks、Ce在选定变流器和电动机后已经确定,α在选定给定Un∗和额定转速后也已经确定,对于有静差调速系统,唯一可调的只是放大器放大倍数KP,KP=KCe/αKs。当K能满足稳态指标(D,S),而不能满足系统稳定性的要求时,如果不能降低稳态指标,则需要考虑改变控制方案,例如采用无静差调速系统。
相关文章

图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29

转差频控制的基本思想是采用转子速度闭环控制,速度调节器通常采用PI控制。它的输入为速度设定信号和检测的电动机实际速度之间的误差信号,速度调节器的输出为转差频率设定信号。速度调节器的限幅值决定了系统的最大转差频率。因此,控制转差角频率可以实现对电磁转矩Te的控制,达到控制转速的目的。......
2025-09-29

系统切换是指冗余CPU判断是否需要进行系统切换之后自动切换控制系统与待机系统,包括控制系统异常时的切换和由网络模块的系统切换请求而进行的切换。......
2025-09-29

某炼铁厂1号750m3高炉全液压SGXP-240泥炮使用初期,液压故障主要是转炮回转机构不动作和堵铁口时间过长。其中,阀1和阀2是外控外泄的液控单向阀,组合后作液压锁用。根据经验,基本排除了阀台、管线和液压缸泄漏的可能,初步判断故障的原因可能发生在前置阀块上,而且是阀5、阀6处于关闭状态造成的。处理措施是对p6、p5予以调整,使得p6约为1.25p5。......
2025-09-29

对于像数控加工中心类的机床,其要求的调速范围就更宽了。带有变速齿轮的配置方式这是大、中型数控机床采用较多的调(变)速配置方式,见图2-31a。利用三相异步电动机的转矩和定子磁链及其模型输出的定子磁链相位,直接对逆变器桥臂的通断状态进行控制。......
2025-09-29

图9.10 为工作台位置控制系统的工作原理图。图9.10工作台位置电液控制系统1—输入电位计;2—反馈电位计;3—放大器;4—电液伺服阀;5—液压缸;6—齿条齿轮副;7—工作台图9.11电液伺服系统的职能方块图θr—输入电位计转角;θc—反馈电位计转角;Ur—输入电位计输出端电位;Uc—反馈电位计输出端电位;i—电液伺服阀输入电流;ΔU=Ur-Uc;q—电液伺服阀输出流量;y—活塞位移......
2025-09-29
图11-3 机械特性不均匀引起的轧出厚度偏差控制原理图11-4 支撑辊偏心引起的轧出厚度偏差控制原理图11-5 利用张力改变轧件塑性线斜率进行厚差控制原理......
2025-09-29
实操目的1.通过实操训练,进一步加强对三相异步电动机控制电路图的阅读能力。实操内容及其步骤1.检查各个电器的型号和规格是否符合要求;2.按使用的变频器说明书提供的电路图进行接线;3.检查接线无误后,通电进行调速,并注意观察三相异步电动机的转速变化情况;4.实操结束后,要进行归纳总结,写出实操报告。......
2025-09-29
相关推荐