按润滑方式大体分为自润滑轴承和外注润滑脂润滑轴承两种。这种轴承能长期保持自润滑性能,在自动扶梯上得到广泛地使用。图9-1-9 自润滑密封轴承使用实例示意图a)滑动轴承 b)小链轮也有的普通型自动扶梯在不重要部位以自润滑滑动轴承代替滚动轴承,以降低生产成本。这种轴承的材料一般采用具有低摩擦因数的材料(如尼龙),有的带有一定的自润滑功能,在使用中也不需要加油。......
2025-09-29
假设有一个伺服电动机带动一滑块在轨道上左右滑行,伺服电动机转速3000转/分钟,旋转编码器一圈为1000个脉冲,电动机每转一圈滑块运行10 mm,左限位开关输入点I0.1,右限位开关为输入点I0.2,参考点输入为I0.0。系统示意图如图9-45所示。要求从参考点位置,向左极限方向运动30 mm。
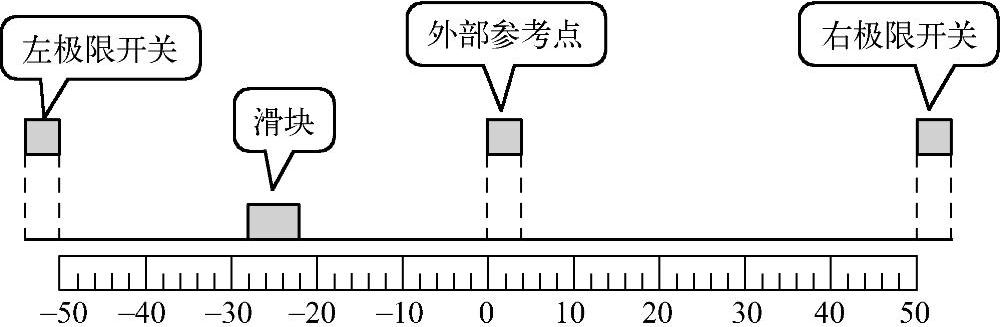
图9-45 系统示意图
1.IO分配和定义变量表
根据要求定义的变量表如图9-46所示。

图9-46 变量表
2.组态CPU脉冲输出
在设备配置中组态CPU属性的“脉冲发生器”项,勾选激活脉冲发生器,脉冲输出类型为PTO型,则系统默认指定Q0.0为脉冲输出,Q0.1为方向输出,HSC1为此脉冲发生器功能的高速计数器。
3.组态工艺对象
在项目视图的项目树中添加轴工艺对象,再定义轴的相关参数。硬件接口组态选择Pulse_1作为轴控制PTO,长度单位为mm。驱动器接口组态Q0.4作为“启用”输出,其他默认。机械组态电动机每转的脉冲数为1000,每转的运载距离为10 mm。位置限制如图9-47所示。最大速度、启动/停止速度组态以及加减速曲线组态如图9-48所示。急停减速组态如图9-49所示。回参考点组态如图9-50所示。
4.编写程序
首先添加全局数据块,建立相关的控制变量和状态指示,再建立FC块,将相关的控制指令拖入到FC块中,在主程序块中循环调用FC。
新建全局数据块DB15,定义控制变量与状态变量如图9-51所示。
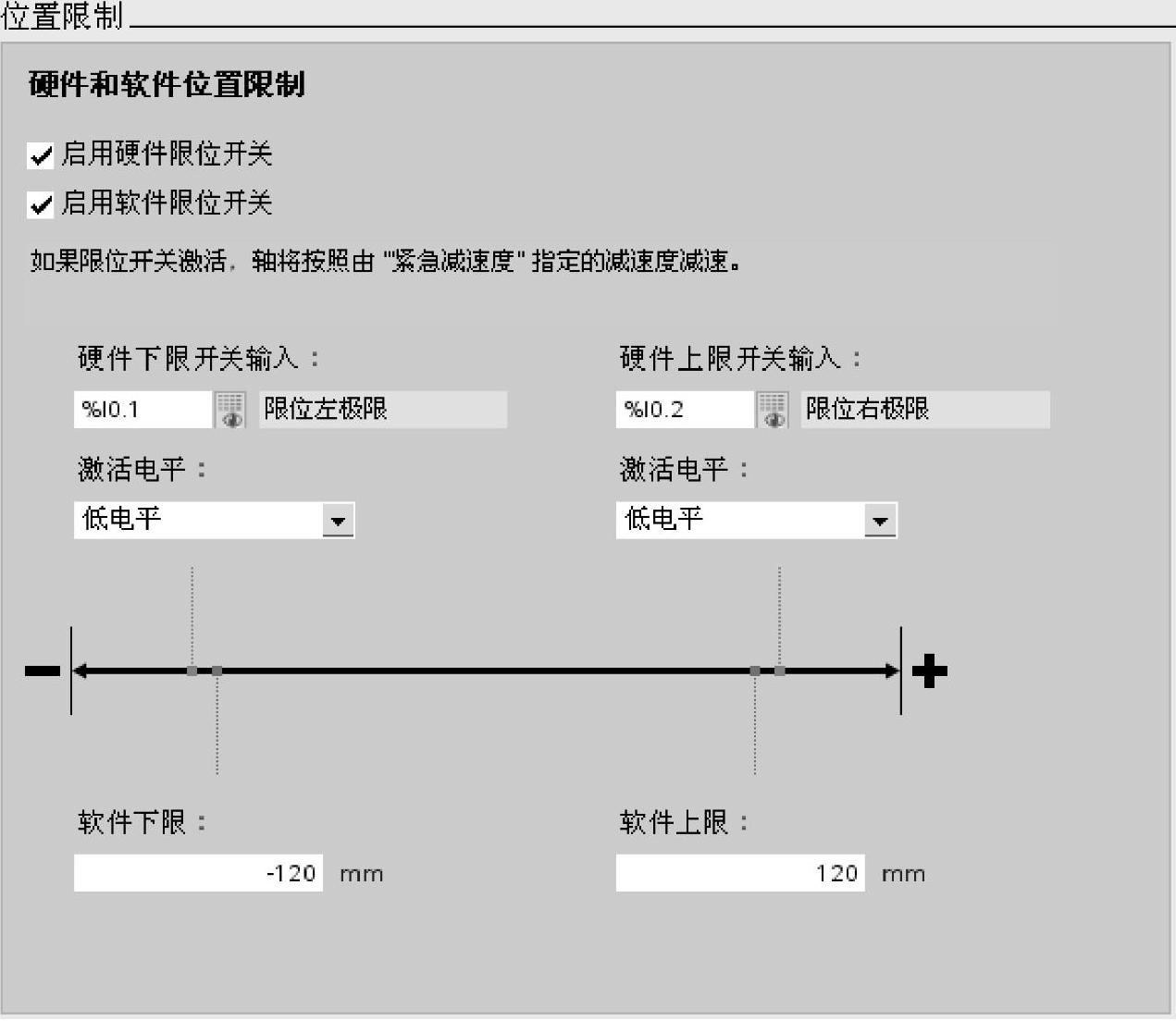
图9-47 位置限制组态
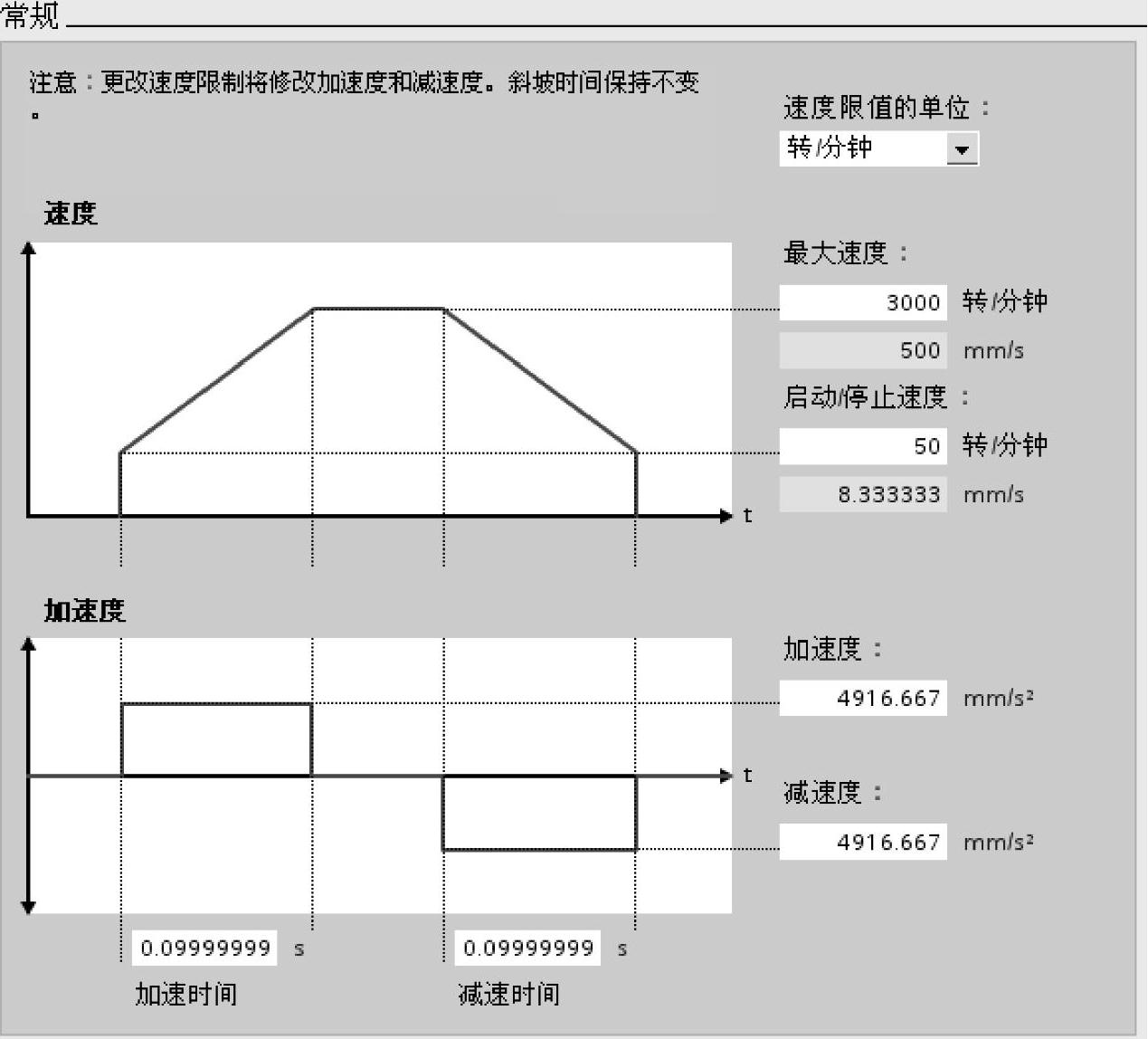
图9-48 速度和加速度组态

图9-49 急停减速组态
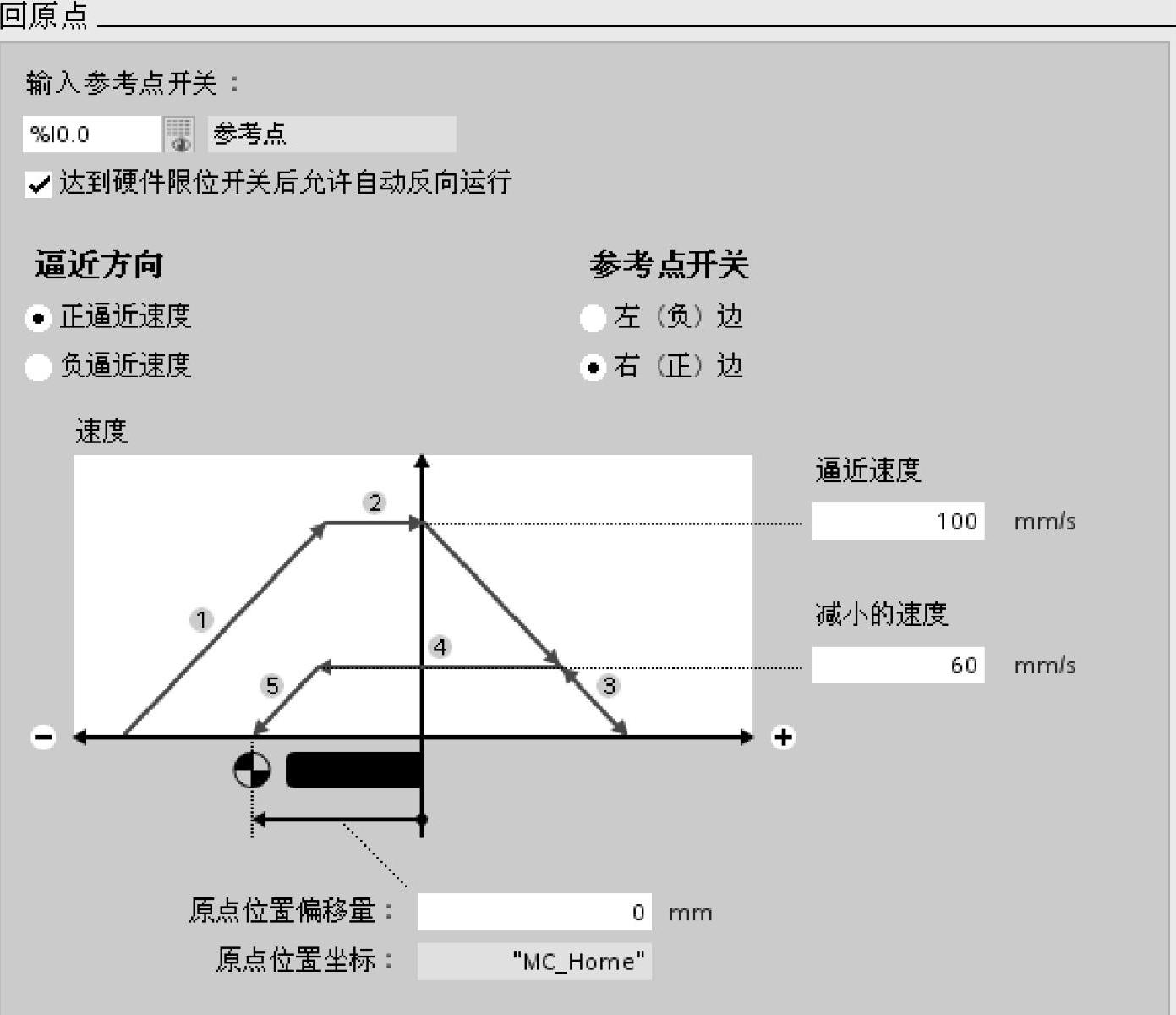
图9-50 回原点组态
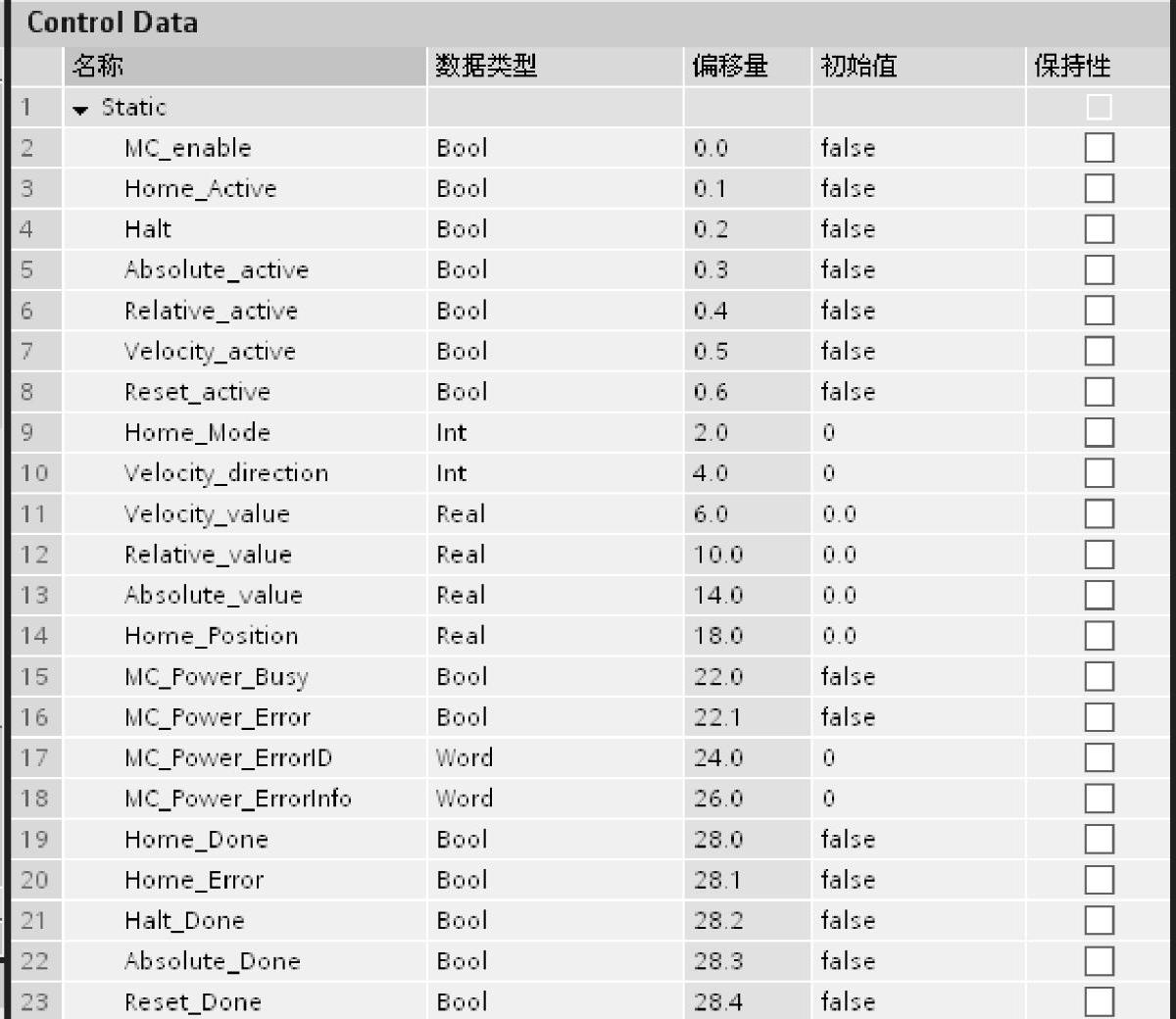
图9-51 定义数据块
添加FC块FC6,编写程序如图9-52所示,程序含义见注释。(https://www.chuimin.cn)
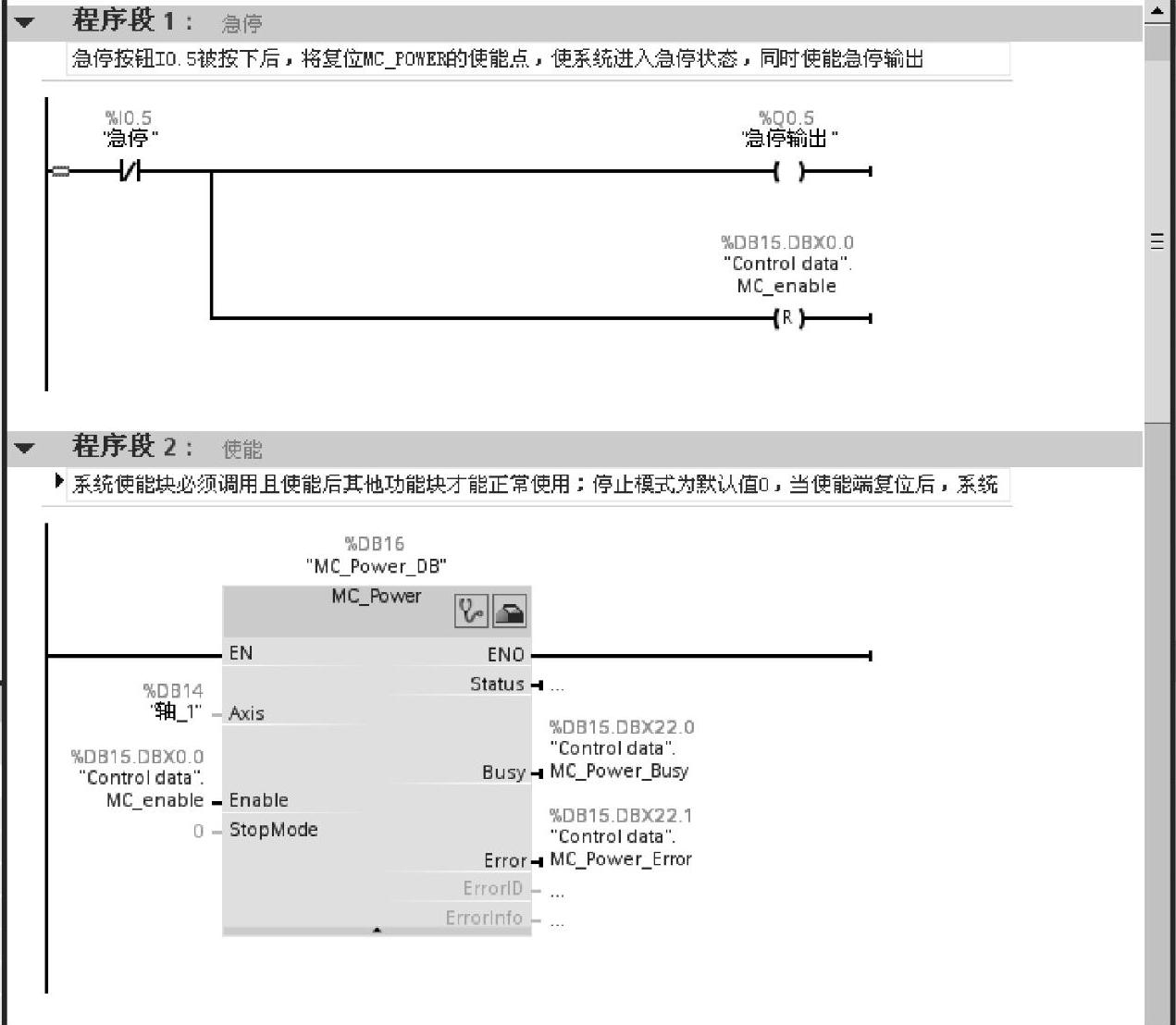
图9-52 例子程序FC6
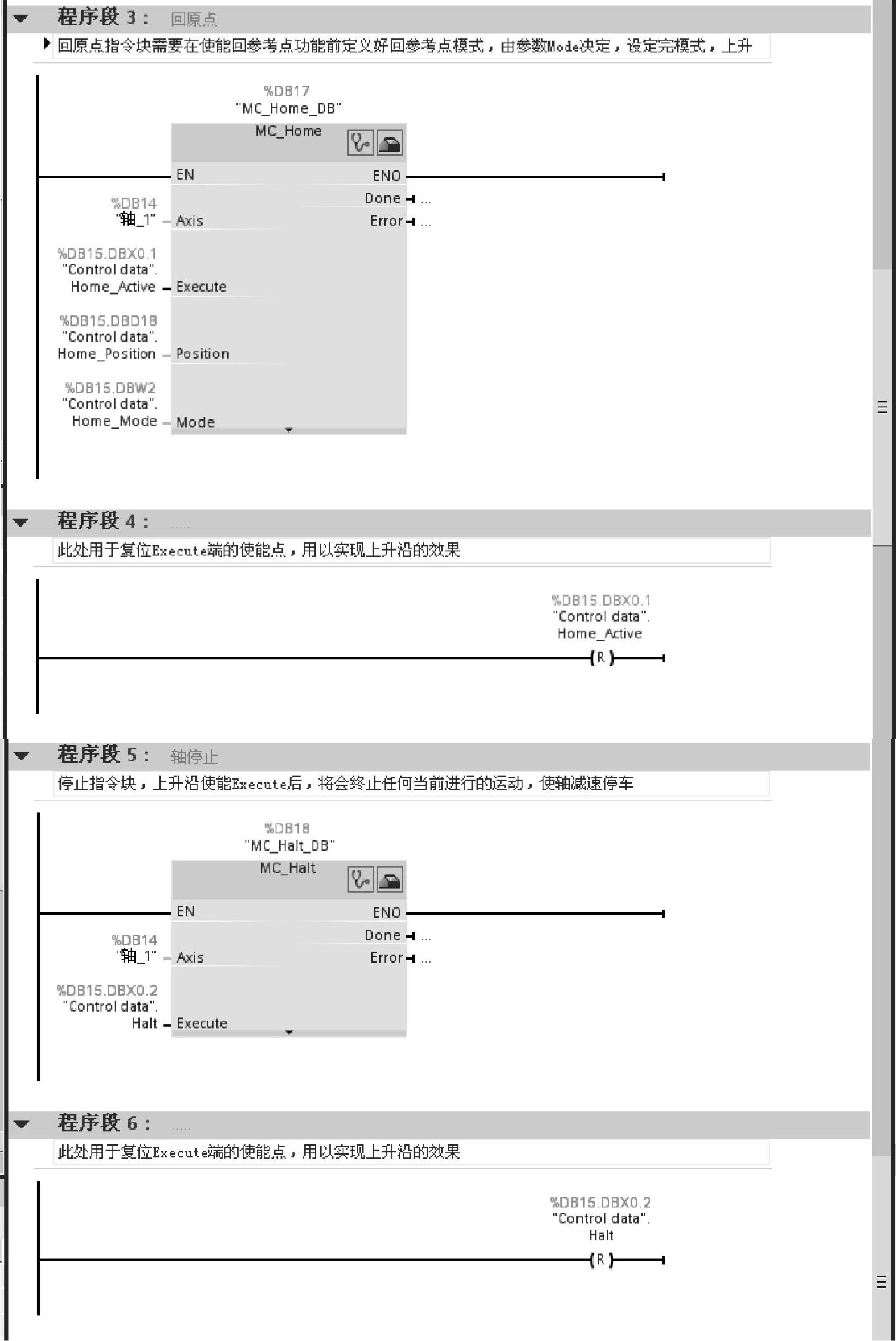
图9-52 例子程序FC6(续)

图9-52 例子程序FC6(续)
FC中程序编写完成后,需要在Main(OB1)中调用此FC块。至此,程序组态部分完成。程序组态完毕后,将整个项目下载到CPU中。
5.相关控制位使能
通过监视表格使能相关控制位实现向左极限运动30 mm的功能,具体操作步骤如下:
1)将变量Control data.MC_enable置为“1”,使能MC_Power指令块。
2)设置Control data.Home_mode为3,主动回原点。
3)将Control data.Hone_Active置为“1”执行回原点功能。
4)令Control data.Velocity_value=100.0,设置速度为100。
5)令Control data.Absolute_value=-30.0,设置绝对位置为-30。
6)令Control data.Absolute_active为“1”,激活绝对位置移动。
7)可通过状态位监控程序运行状态。若程序在运行过程中出现报错,如到达软件限位,可通过MC_Reset指令块复位错误后再进行下一步操作。
需要注意的是,在此例中,回参考点过程会有如下3种情况。
1)滑块起始位置在参考点左侧,在到达参考点右边沿时。从逼近速度减速至到达速度的过程已经完成。当检测到参考点左边沿时,电动机开始减速至到达速度,轴按此速度移动到参考点右边并停止,此时位置计数器会将参数Position中的值设置为当前参考点。
2)滑块起始位置在参考点左侧,在到达参考点右边沿时,从逼近速度减速至到达速度的过程没有执行完。由于在右边沿位置,轴未能减速至到达速度,轴会停止当前运动并以到达速度反向运行,直到检测到参考点右边沿的上升沿,轴会再次停止然后以到达速度正向运动,直到检测到参考点右边沿的下降沿。
3)滑块起始位置在参考点右侧,轴在正向运动中没有检测到参考点,直到碰到右限位点,此时轴减速至停止,并以逼近速度反向运行,当检测到左边沿后,轴减速停止并以到达速度正向运行,直到检测到右边沿,回参考点过程完毕。
回参考点过程中,MC_Home指令块中的Busy位始终输出高电平,一旦整个回参考点过程执行完毕,工艺对象数据块中的HomingDone位被置位成1。
6.获得当前位置及在线修改组态参数
要获得当前位置及在线修改组态参数,需在编辑模式下打开工艺对象数据块。以当前应用为例,当滑块正在运行时,可实时修改绝对位移指令块中的速度值,并用上升沿重新触发绝对位移指令块的Execute使能端,则此时系统会按当前速度计算所需的加减速时间及所用脉冲数,系统不会先到达启动停止速度,实时改变速度后运动到指定位置。
相关文章

按润滑方式大体分为自润滑轴承和外注润滑脂润滑轴承两种。这种轴承能长期保持自润滑性能,在自动扶梯上得到广泛地使用。图9-1-9 自润滑密封轴承使用实例示意图a)滑动轴承 b)小链轮也有的普通型自动扶梯在不重要部位以自润滑滑动轴承代替滚动轴承,以降低生产成本。这种轴承的材料一般采用具有低摩擦因数的材料(如尼龙),有的带有一定的自润滑功能,在使用中也不需要加油。......
2025-09-29

中期的PLC由于微处理器的出现而发生了巨大的变化。近期的PLC由于超大规模集成电路技术的迅速发展,微处理器的市场价格大幅度下跌,使得各种类型的PLC所采用的微处理器的档次普遍提高。而且,为了进一步提高PLC的处理速度,各制造厂商还纷纷研制开发了专用逻辑处理芯片,使得PLC的软、硬件功能发生了巨大变化。......
2025-09-29
S7-1200 PLC的比较指令如表5-3所示。比较指令只能对两个相同数据类型的操作数进行比较。图5-27 例5-7程序值在范围内指令IN_RANGE和值在范围外指令OUT_RANGE可测试输入值是在指定的值范围之内还是之外。如果比较结果为TRUE,则其输出为真。图5-28 例5-8程序使用OK和NOT_OK指令可测试输入的数据是否为符合IEEE规范754的有效实数。......
2025-09-29

捷联式惯性导航系统没有物理伺服平台。 初始对准是指惯性系统进入导航工作状态之前, 确定每个加速度计输入轴的方向或者捷联矩阵的初始值。 当前状态计算是指惯性系统进入导航工作状态, 根据加速度计和陀螺仪输出, 按照力学方程组, 实时解算并提供载体的速度、位置和姿态角等导航参数信息。随着航海、航空、航天技术的不断发展, 人们对惯性导航系统工作精度要求越来越高。......
2025-09-29

不连接到控制器的变量称为内部变量。内部变量存储在HMI设备的内存中,只有这台HMI设备能够对内部变量进行读写访问。表7-2 内部变量的数据类型外部变量是PLC中所定义的存储单元的映像。需要注意的是,一个KTP面板最多能连接4个S7-1200 PLC,一个S7-1200 PLC最多能连接3个KTP面板,否则在STEP 7 Basic V10.5软件中不能建立HMI与PLC的通信连接。图7-1 创建变量可以创建数组变量以组态具有相同数据类型的大量变量,数组元素保存到连续的地址空间中。......
2025-09-29

S7-1200 PLC与S7-200 PLC之间的通信只能通过S7通信来实现,因为S7-200 PLC的以太网模块只支持S7通信。主要编程工作都在S7-200 PLC一侧完成,需要将S7-200 PLC的以太网模块设置成客户端,并用ETHx_XFR指令编程通信。输入通信伙伴S7-1200 PLC的IP地址为“192.168.0.2”。下载S7-200 PLC及S7-1200 PLC的所有组态及程序,并监控通信结果。在S7-200 PLC中,将“5”、“6”写入VB200、VB201,则在S7-1200 PLC的DB3中收到的数据也为“5”、“6”。......
2025-09-29

高速计数器的应用步骤主要包括:1)在CPU的属性对话框中,激活高速计数器,并设置相关参数。针对此应用,选择CPU 1214C,高速计数器为HSC1,模式为单相计数,内部方向控制,无外部复位。......
2025-09-29
图3-20 结构优化后,打击杆的应力应变分布云图与1688号节点的应力应变时间历程曲线a)应力分布云图与1688号节点的应力时间历程曲线 b)应变分布云图与1688号节点的应变时间历程曲线结构优化后,打击杆分别选用A3钢、调质45钢和调质40Cr时的寿命分布云图如图3-21所示,可见:1)结构优化后的打击杆中间部分寿命较长,原打击杆中间凸台部分的薄弱环节已经消除,这是由于结构优化后的打击杆中间部分为一整个圆柱,应力集中现象消除。......
2025-09-29
相关推荐