如图2-1所示,智能制造系统的整体架构可分为五层。控制系统主要包括适用于流程制造的过程控制系统、适用于离散制造的单元控制系统和适用于运动控制的数据采集与监控系统。图2-1智能制造系统架构3.PLM系统层它主要分为研发设计、生产和服务三个环节。......
2025-09-29
1.硬件结构
FBPRO-8DI八路数字量输入智能节点的硬件框图如图6-6所示。
在图6-6中,微控制器选用Philips公司的P89C51RD2,采用74HC245读取从站地址和数字量的输入状态,通信控制器采用Siemens公司的SPC3,X5045为Xicor公司的串行E2PROM和WDT一体化电路,DC-DC电路选用功率为2W的电源模块,VD1为状态指示灯,RS-485驱动器采用TI公司的65ALS1176。
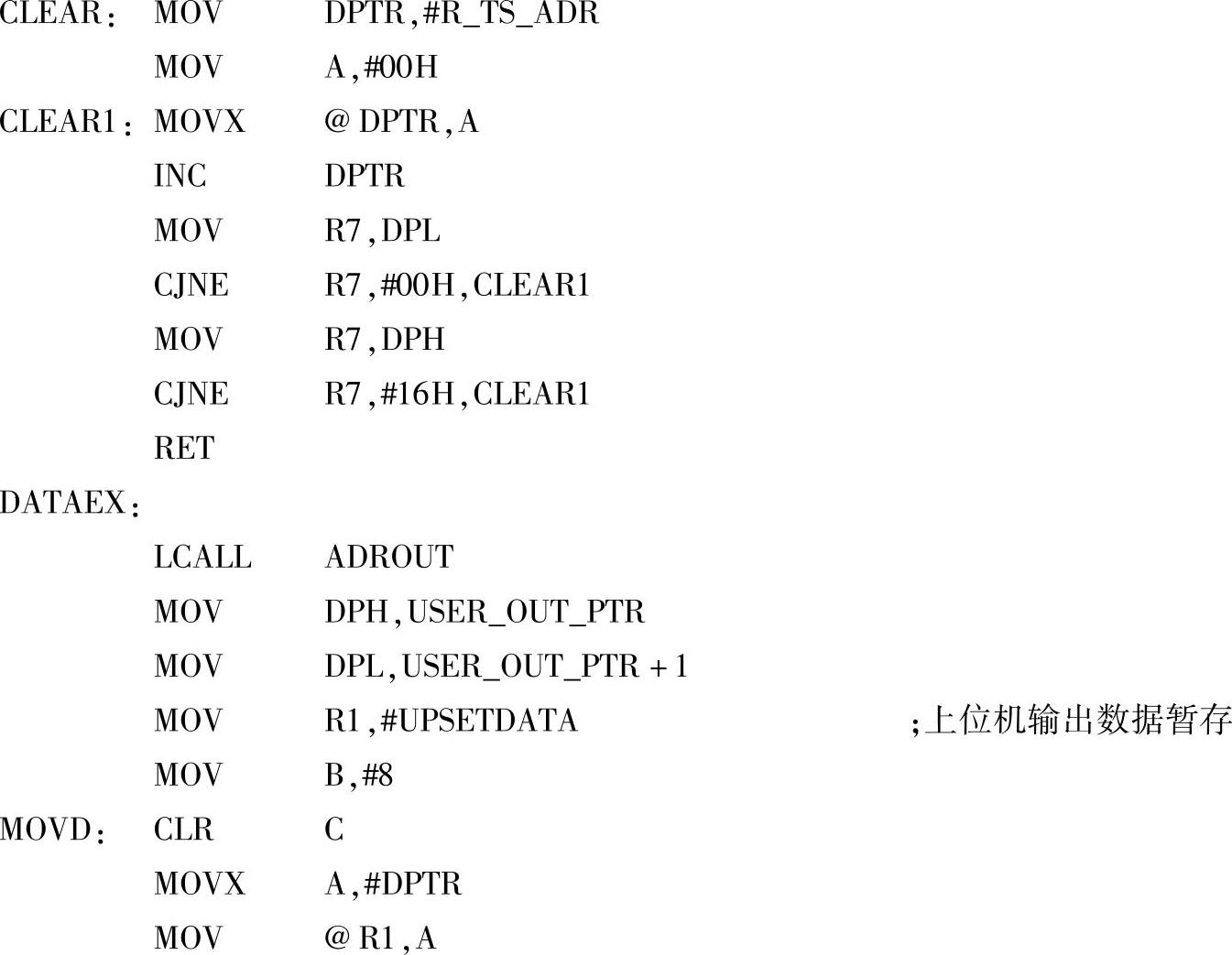
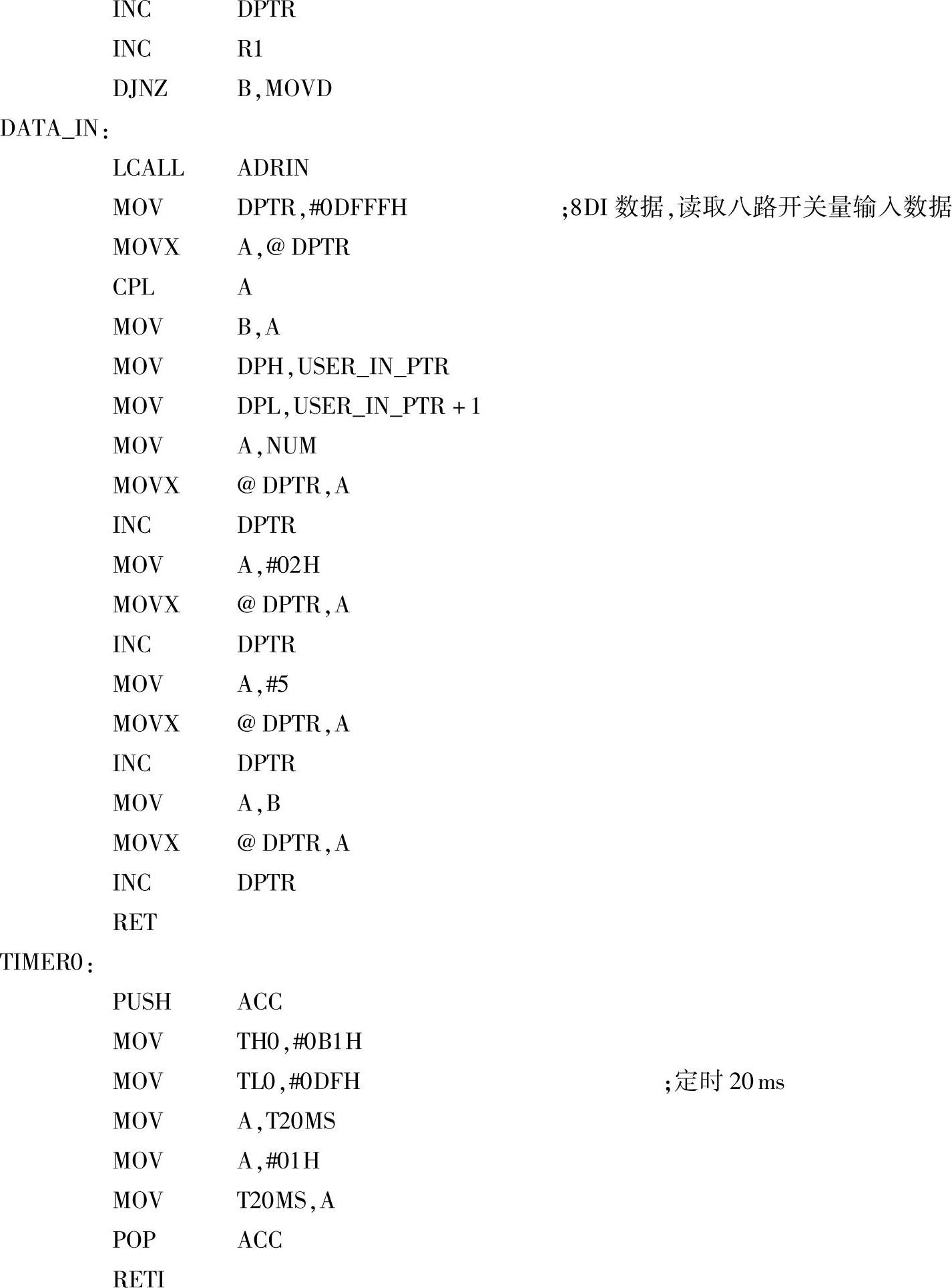
在该智能节点的设计中,读取数字量输入的口地址为0DFFFH,SPC3的起始地址为1000H,设定智能节点从站地址号的口地址为7FFFH。
2.数字量输入电路
数字量输入电路如图6-7所示。
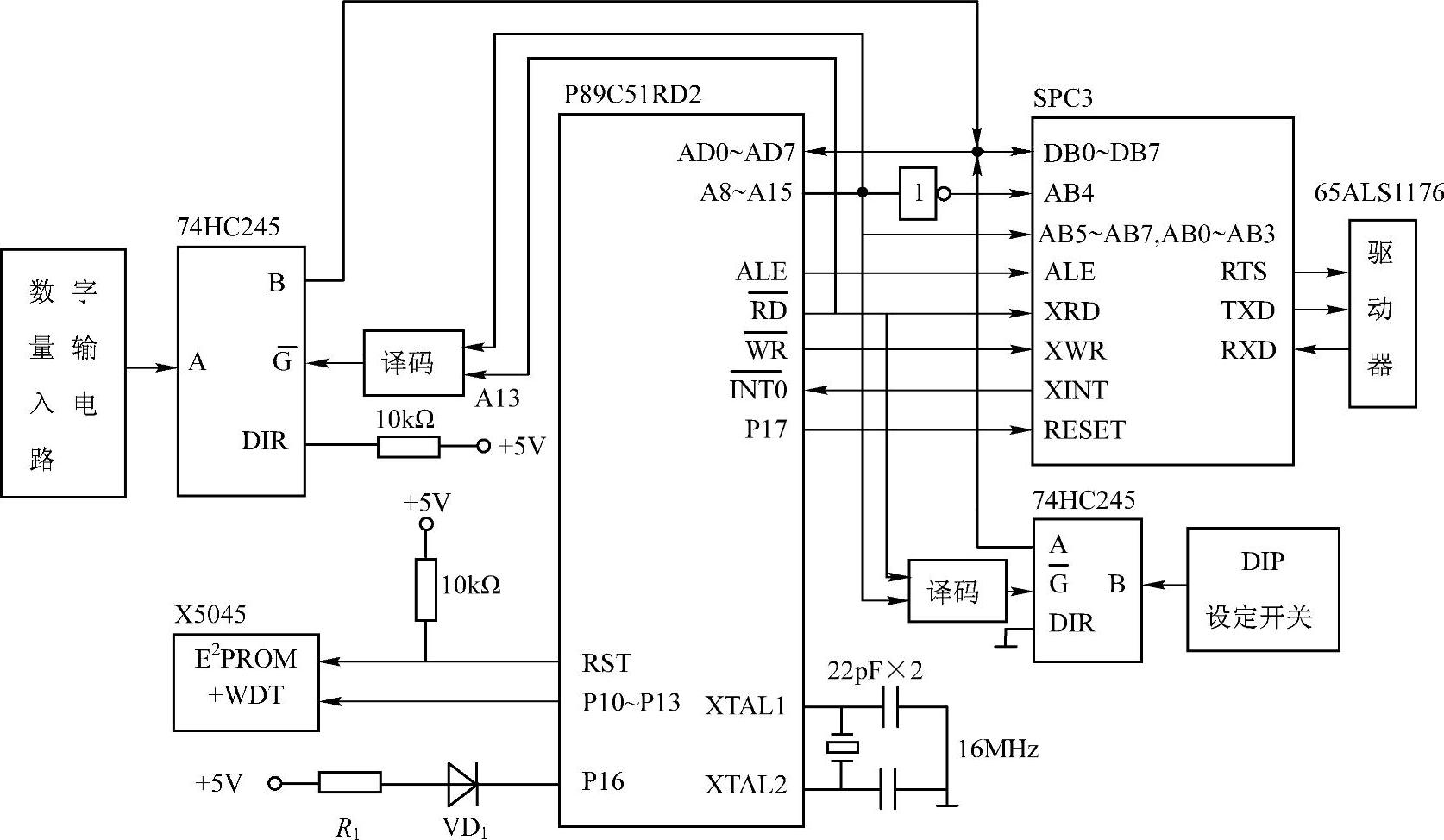
图6-6 FBPRO-8DI智能节点的硬件框图
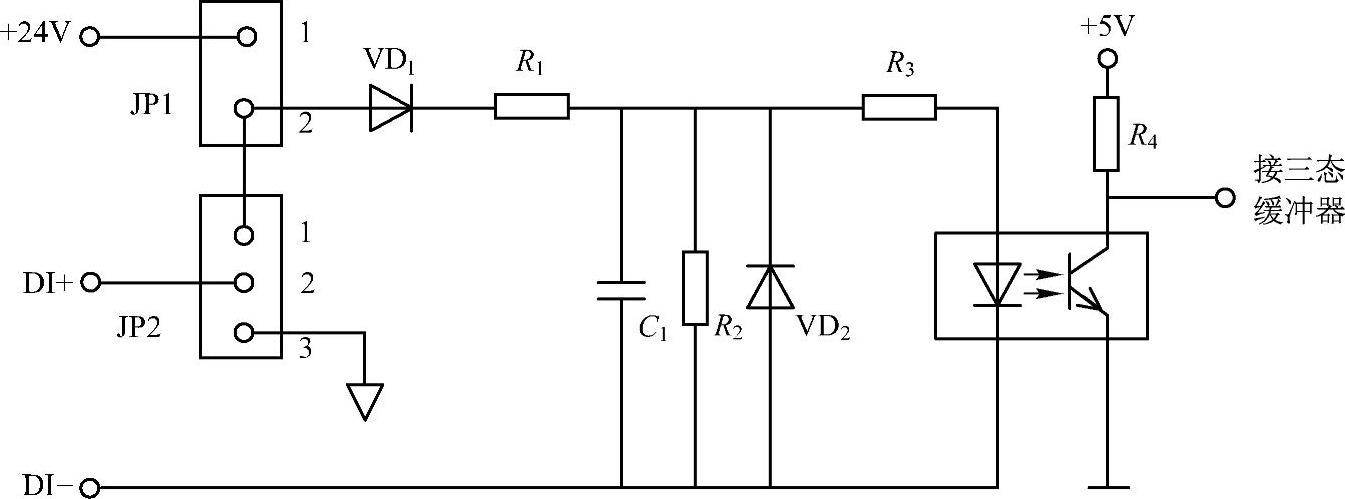
图6-7 数字量输入电路
当跳线器JP1的1—2短路,跳线器JP2的1—2断开、2—3短路时,输入端DI+和DI-可以接一干接点信号。
当跳线器JP1的1—2断开,跳线器JP2的1—2短路、2—3断开时,输入端DI+和DI-可以接一有源接点。
在图6-7中,数字量输入端所用的电源为+24V,也可以是+15V或+5V电源,只需改变电阻R1的阻值即可。
3.软件设计
从站程序包括3个部分:SPC3的初始化程序、SPC3的中断处理程序和具体的I/O应用程序。程序采用结构化编程思想,以便于以后的功能拓展。
在Power_On状态,从站能从2类主站接收Set_Slave_Add报文来改变它的地址,然后从站进入Wait_Prm状态,等待参数化,此状态从站可以接收Get_Cfg和Slave_Diag报文。参数化完成后,从站进入Wait_Cfg状态,等待Chk_Cfg报文。另外,此状态从站可接收Slave_Diag、Set_Prm和Get_Cfg报文。如果Chk_Cfg报文接收完成后,从站将进入Data_Exch状态进行数据通信。此时,从站可接收Writing_Outputs、Reading_Inputs、Global_Control、Slave_Diag、Chk_Diag和Get_Cfg报文。若组态和数据交换不成功,就会返回到参数化阶段。Wait_Prm在对从站进行组态时,必须要编写它的GSD文件。只有有了GSD文件,在COM PRO-FIBUS组态软件下才能对从站组态,否则主站无法识别从站。
从站初始化阶段的顺序如图6-8所示。
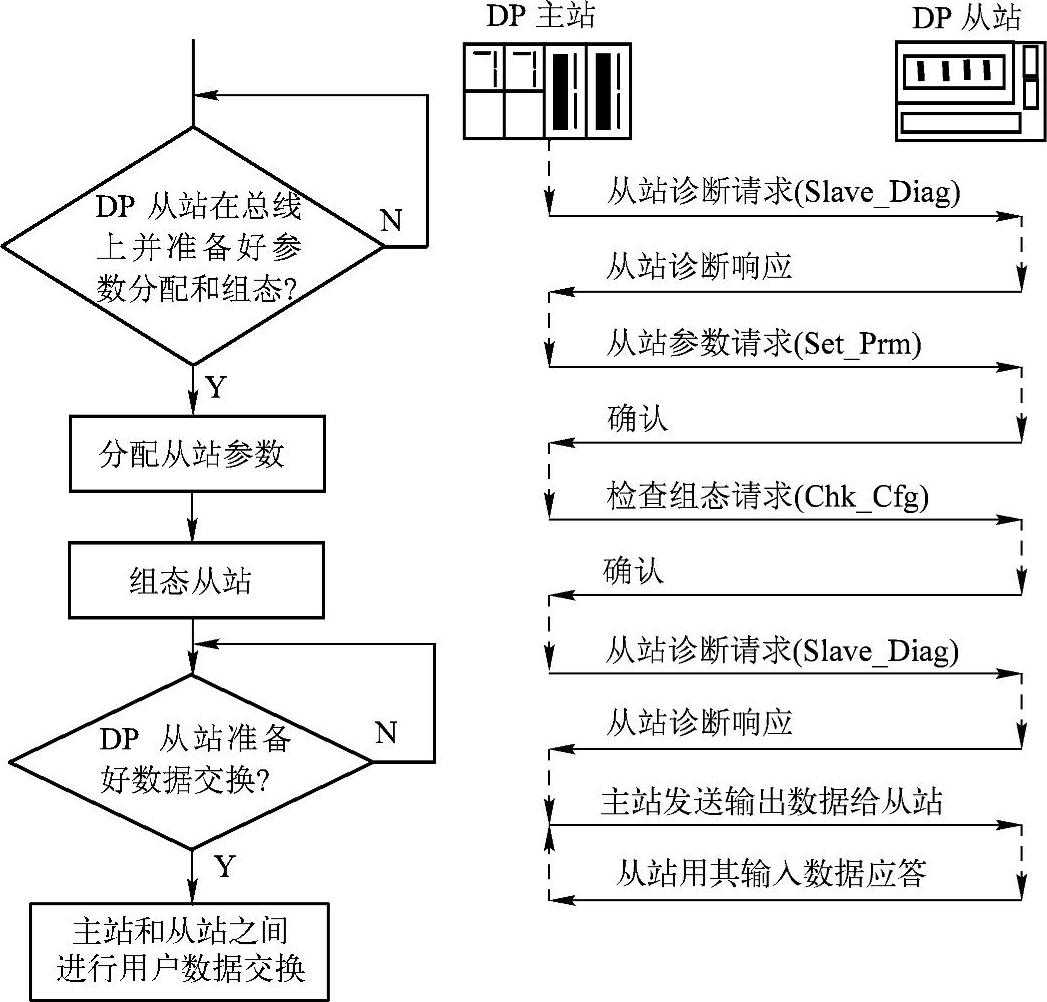
图6-8 从站初始化阶段的顺序
从站主程序流程图如图6-9所示。
SPC3初始化包括设置SPC3允许的中断,写入从站识别号和地址,设置SPC3方式寄存器,设置诊断缓冲区、参数缓冲区,配置诊断缓冲区、参数缓冲区、地址缓冲区,初始化长度,并根据以上初始值求出各个输入、输出缓冲区的指针及辅助缓冲区的起始地址和范围。中断程序流程图如图6-10所示。
数据输入和输出处理(输入、输出相对于主站而言)及用户诊断数据输入放在应用程序循环中。在一个应用循环中,由应用来刷新输入BUF中的数据,以保证所有输入数据是最新的数据。而SPC3在接收到由PROFIBUS主站传送的不同输出数据时,会产生输出标志位(同样位于中断请求字单元),CPU通过在应用循环中轮循标志位来接收主站数据。对于特定应用的诊断信息,需要实时传递到主站。主应用程序在应用循环中判断是否有可用的诊断BUF存在,当有空闲BUF时应用程序输入诊断信息,并请求更新。对于实时性要求严格的系统,应采用中断方式进行输出数据和诊断数据处理。
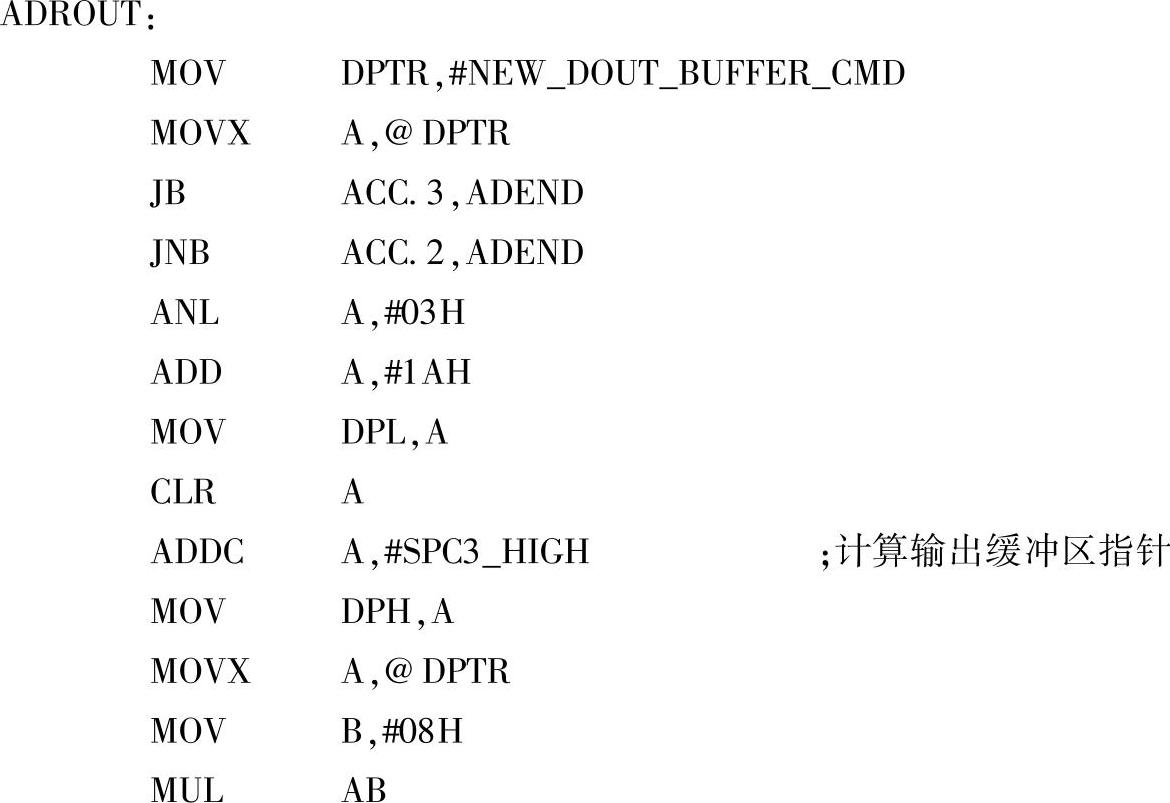
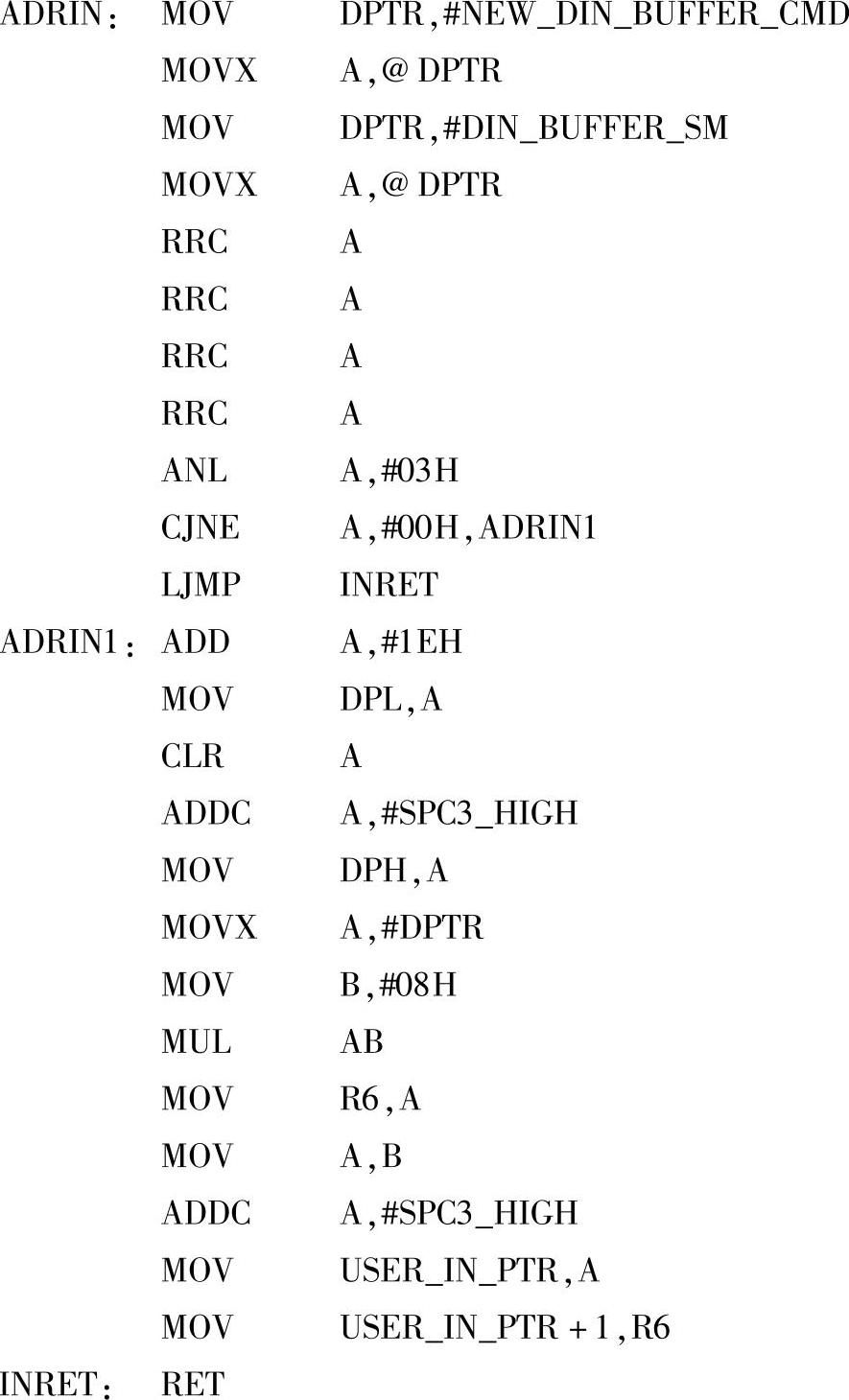
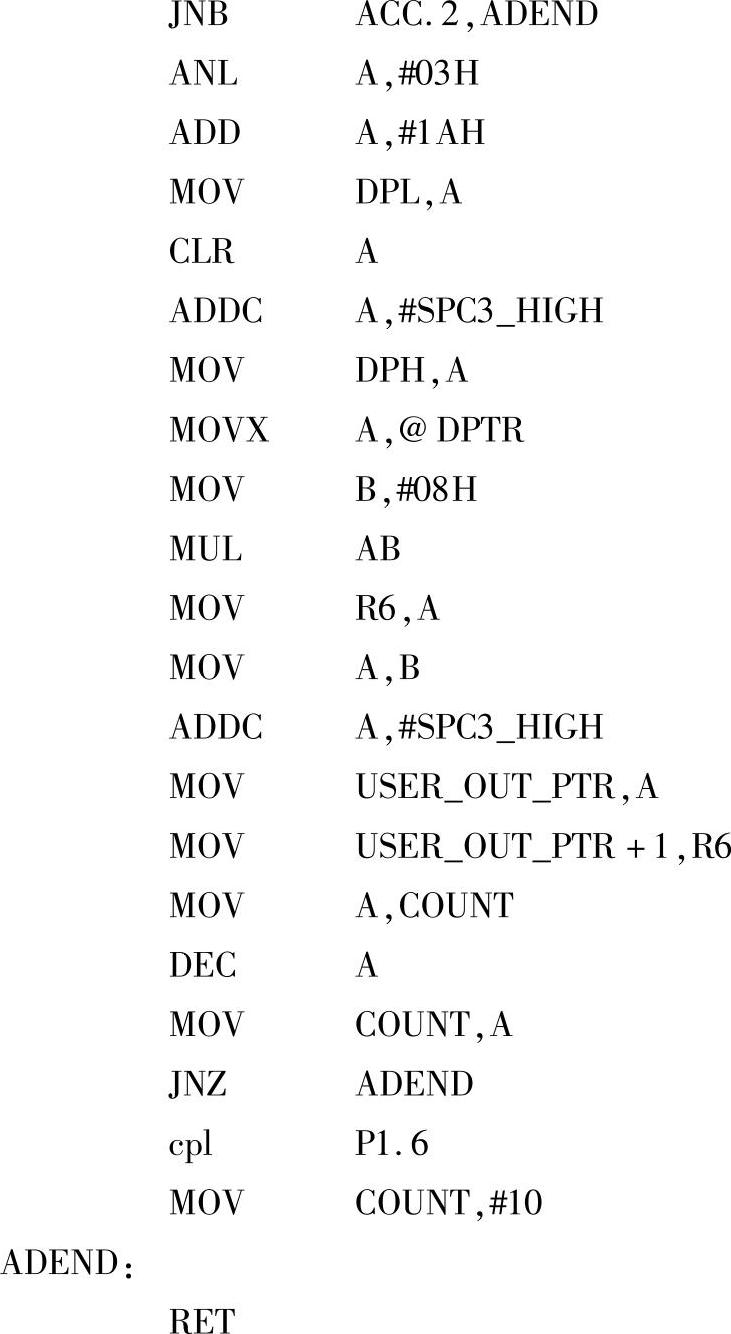
当上位机向从站发送数据后,在输出缓冲器中可以得到的输出数据。在SPC3中有3个输出缓冲器,通过下面的程序段可以确定输出数据缓冲器的起始地址。
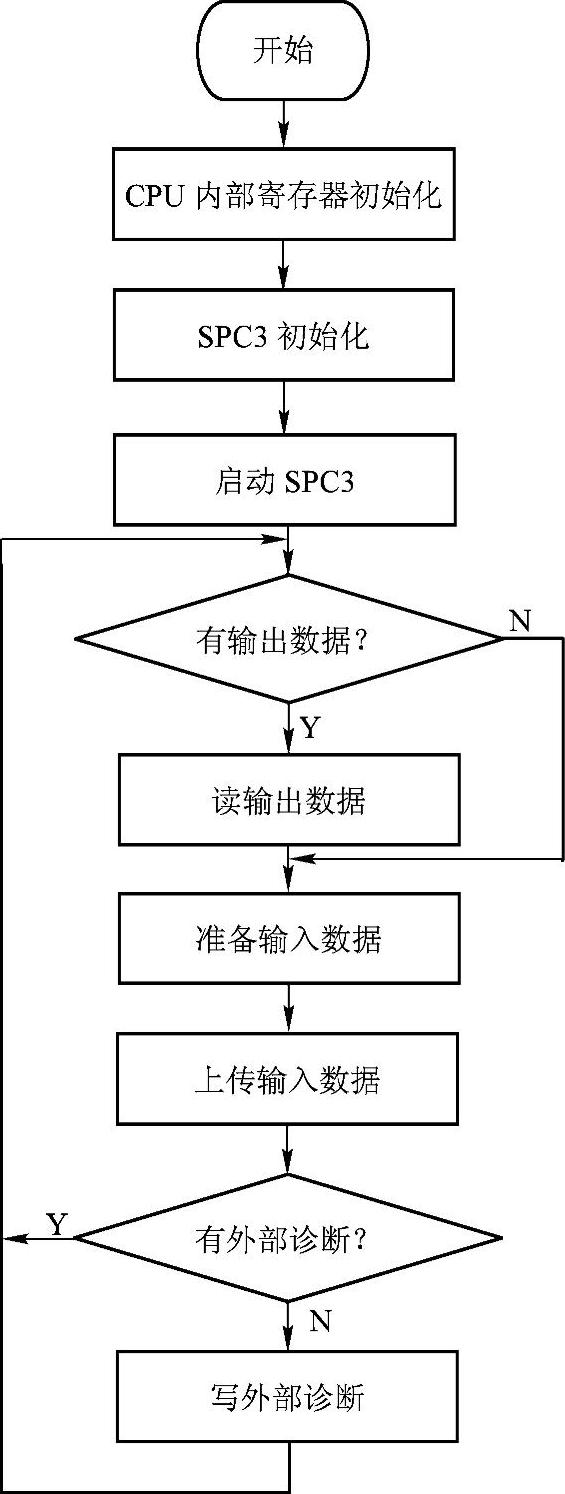
图6-9 主程序流程图

图6-10 中断程序流程图
;更新输出数据指针,结果放到USER_OUT_PTR中
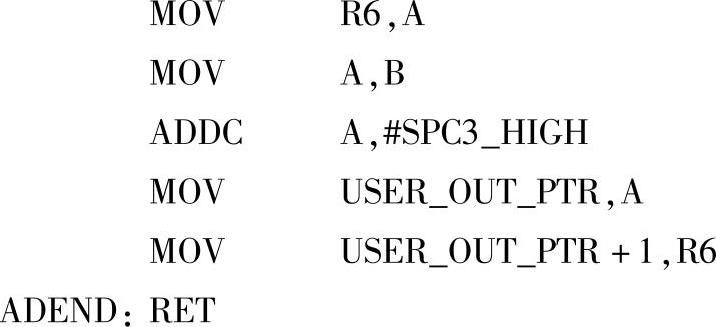
有3个输入缓冲器用于数据输入,当向上位机发送数据时,首先应计算输入数据缓冲器的起始地址,计算方法如下:
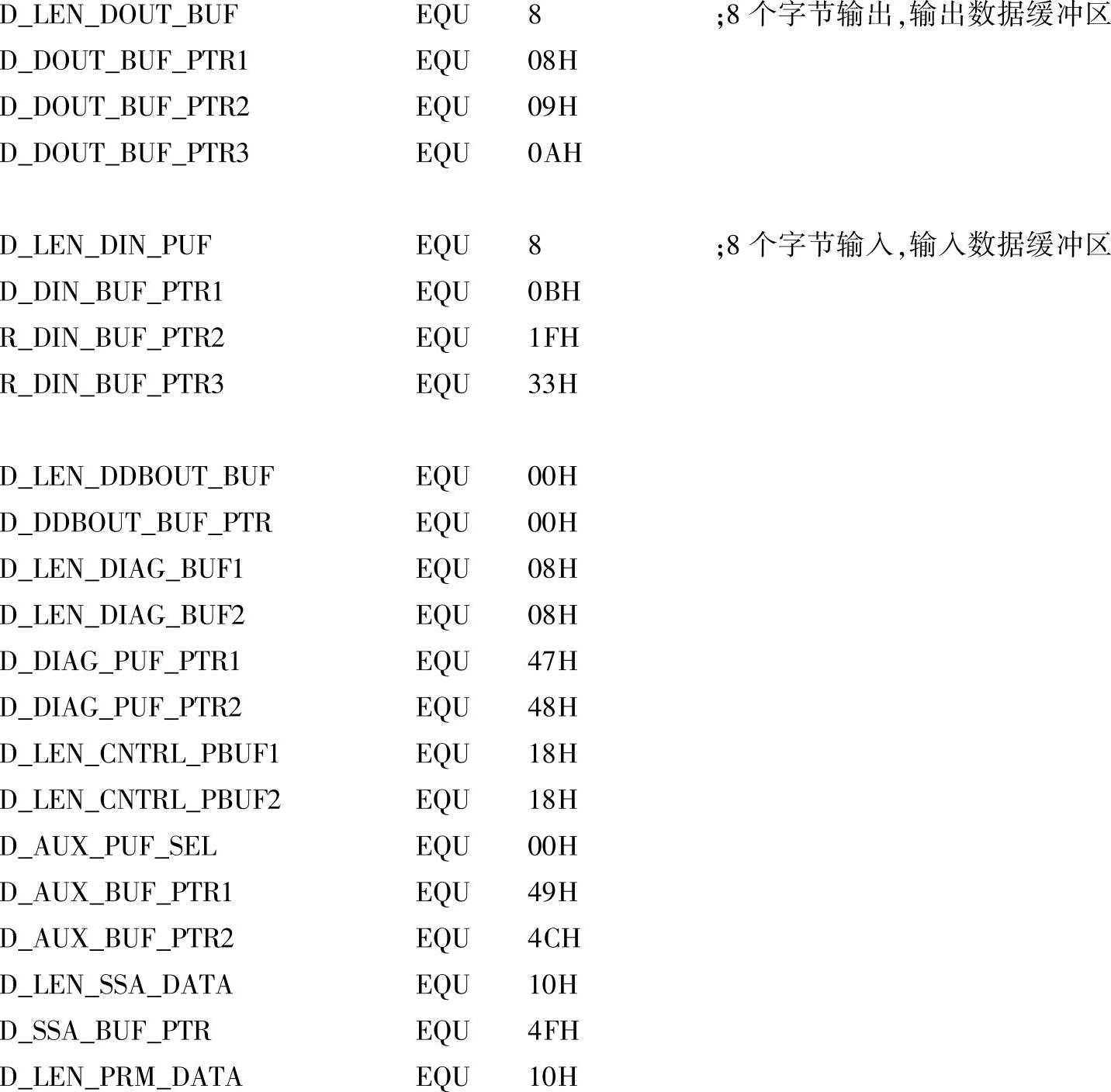
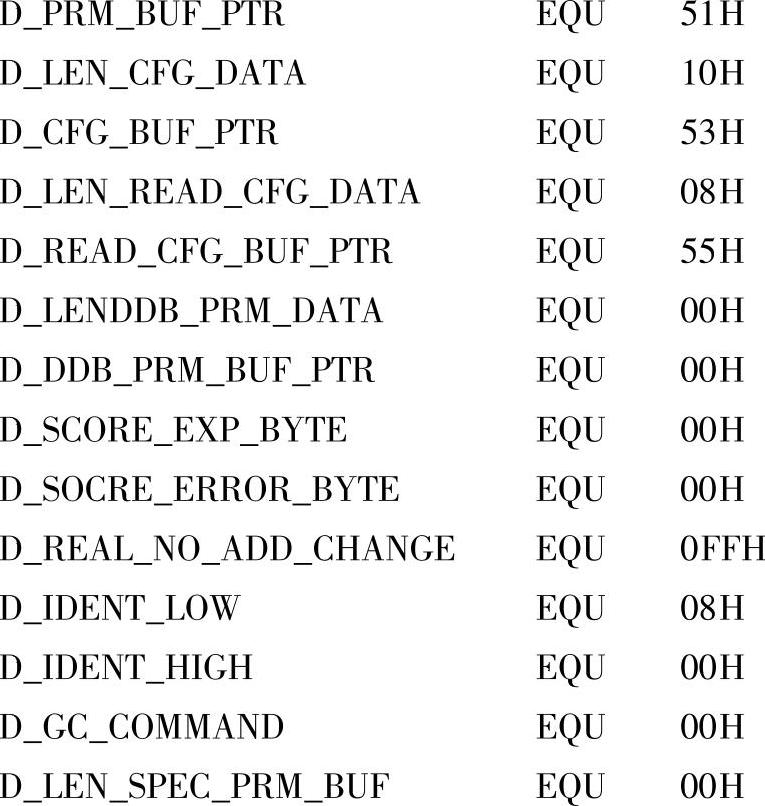
FBPRO-8DI八通道隔离型数字量输入智能节点程序清单如下,其中数据格式为8个字节输出,4个字节输入,第一个字节为地址,第二个字节为功能码,第三个字节为字节长度,第四个字节为开关状态。
(1)P89C51RD2内部单元定义


(2)常数定义

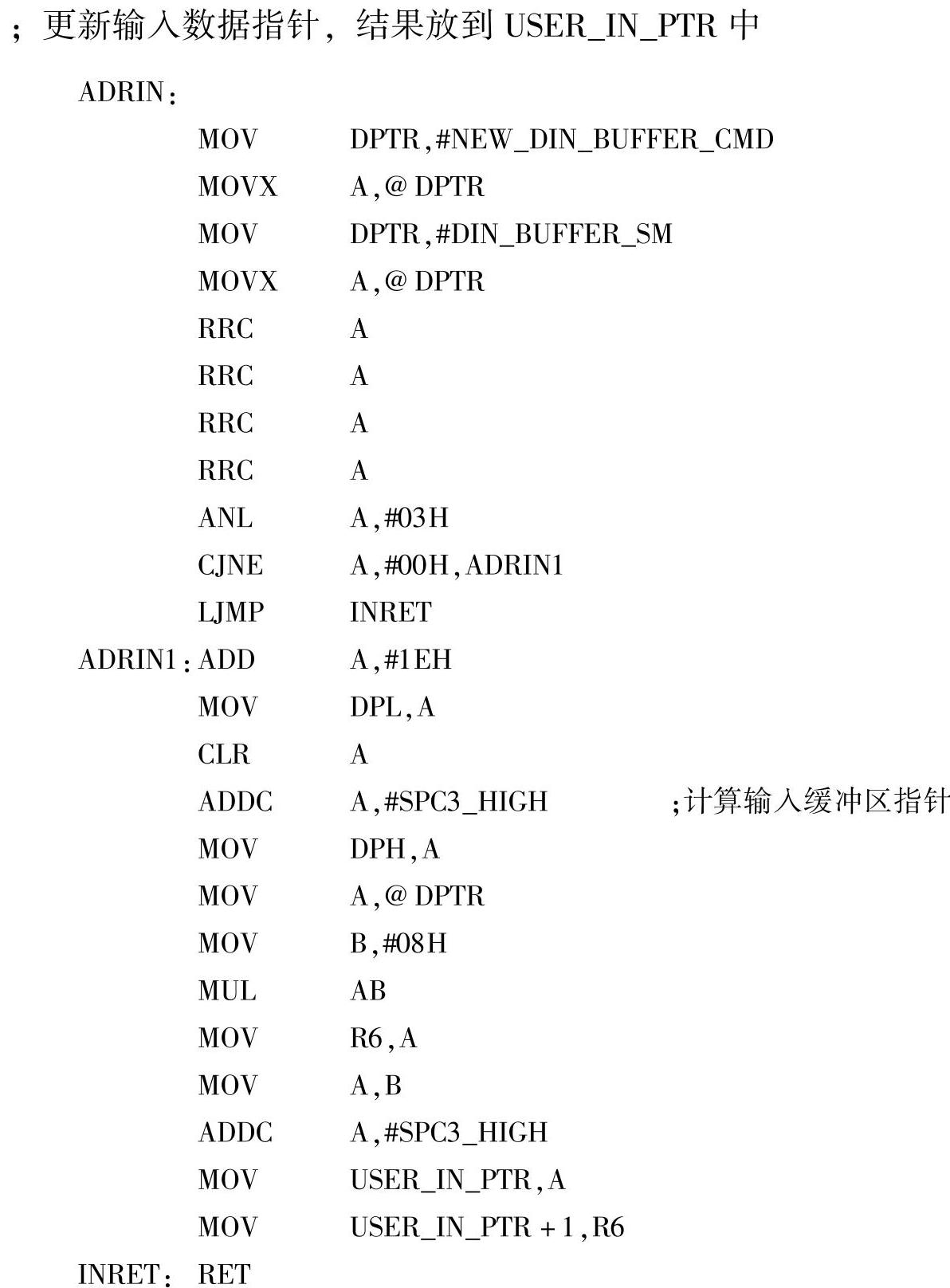
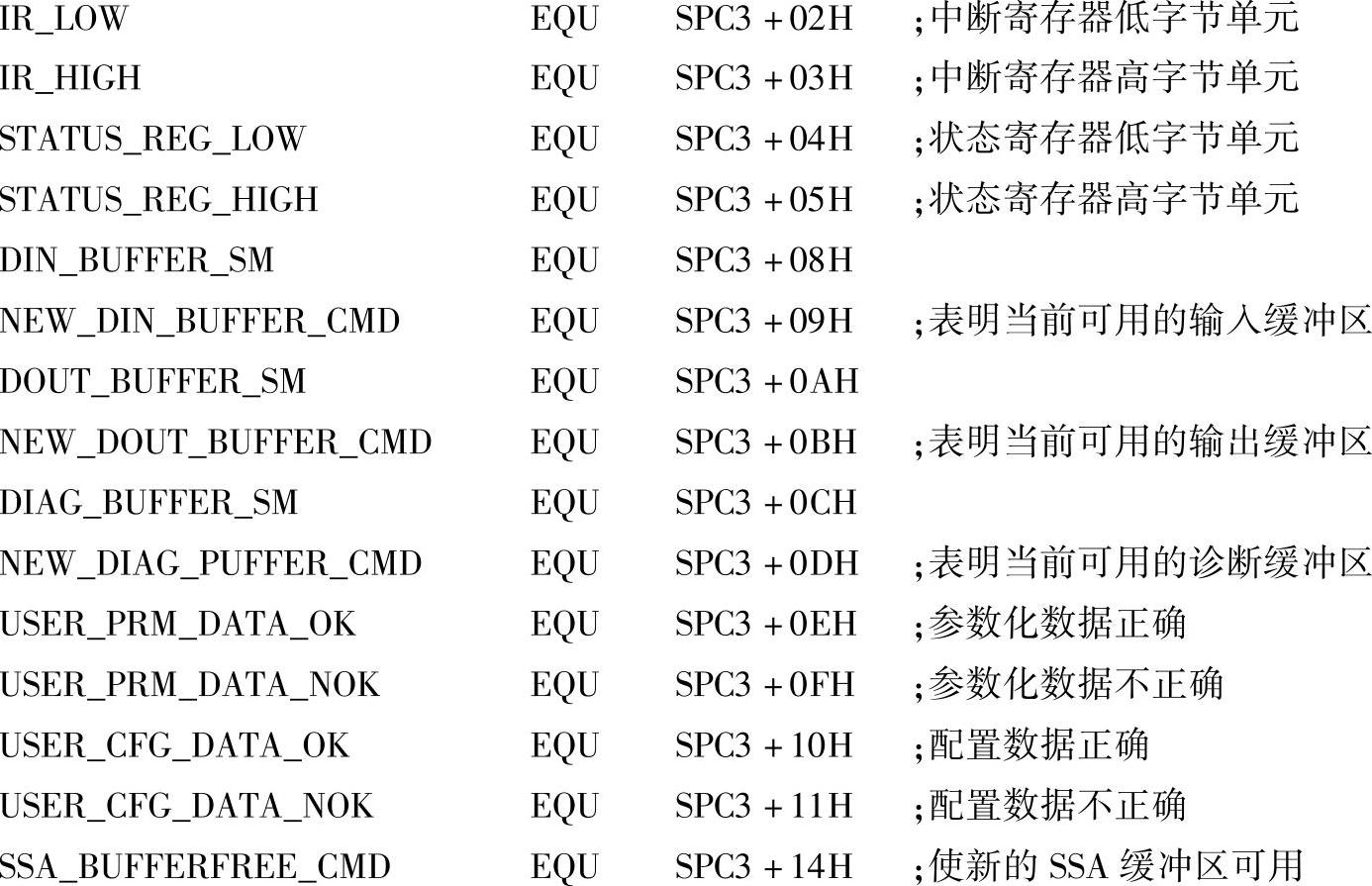
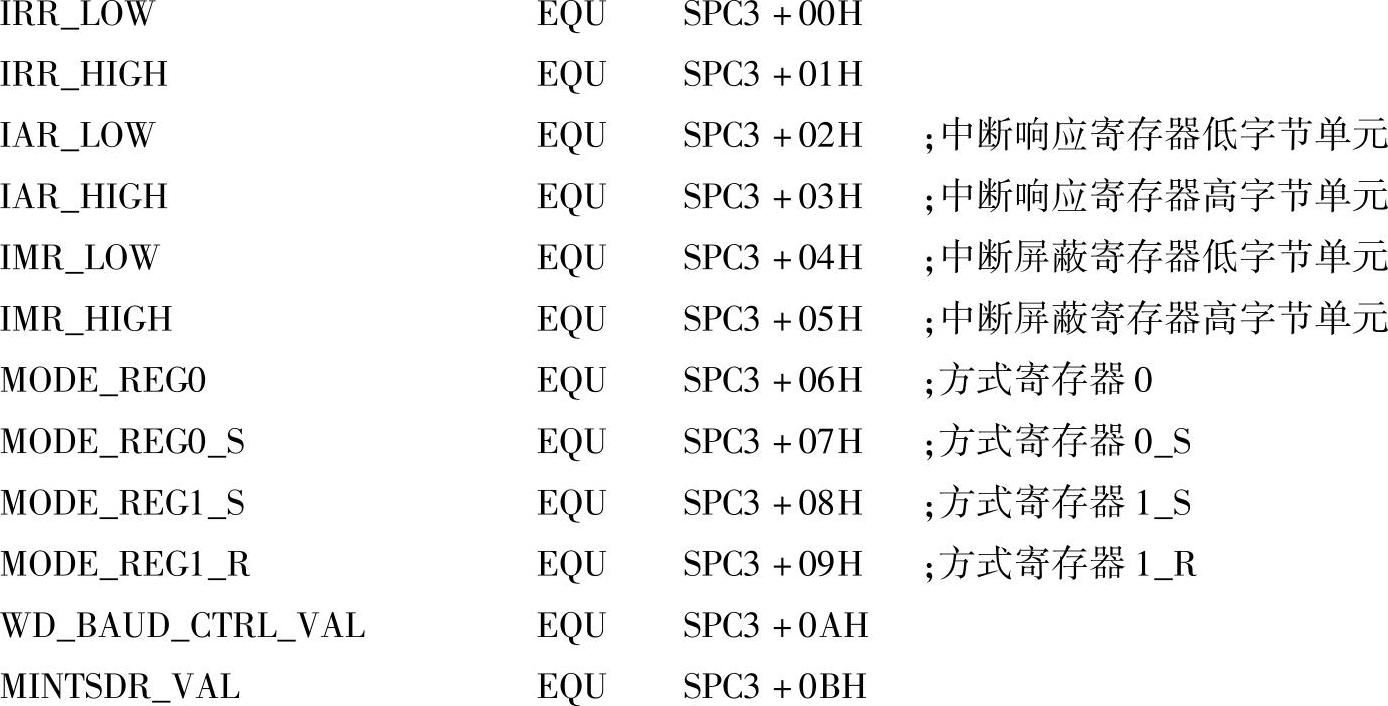
(3)SPC3内部单元定义
1)00H~15H可读的寄存器单元。
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
2)00H~15H可写的寄存器单元。
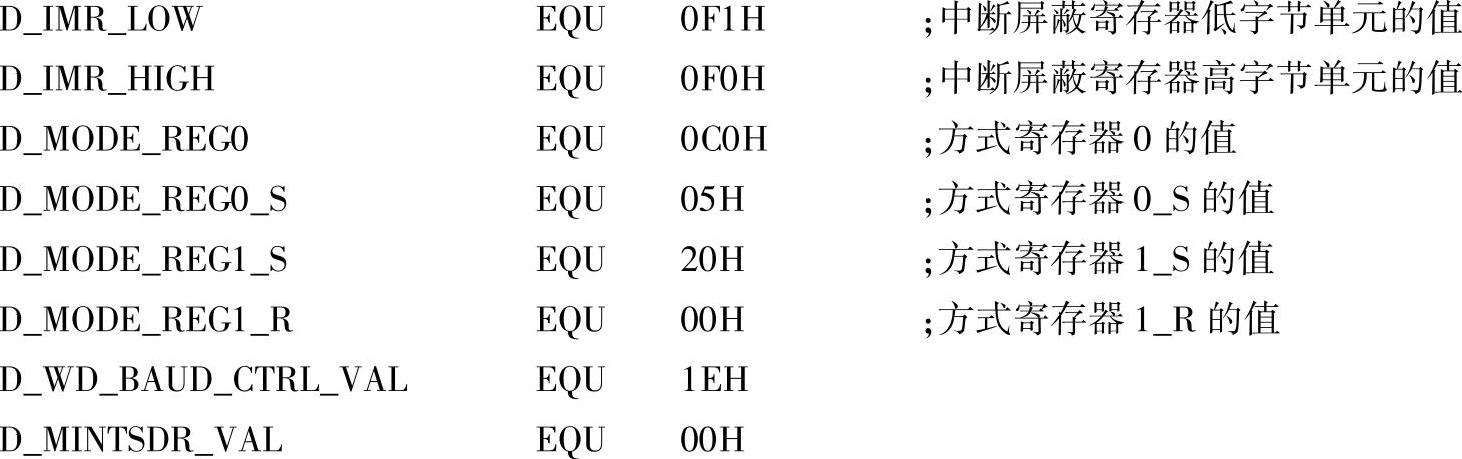
3)00H~15H可写的寄存器的值。
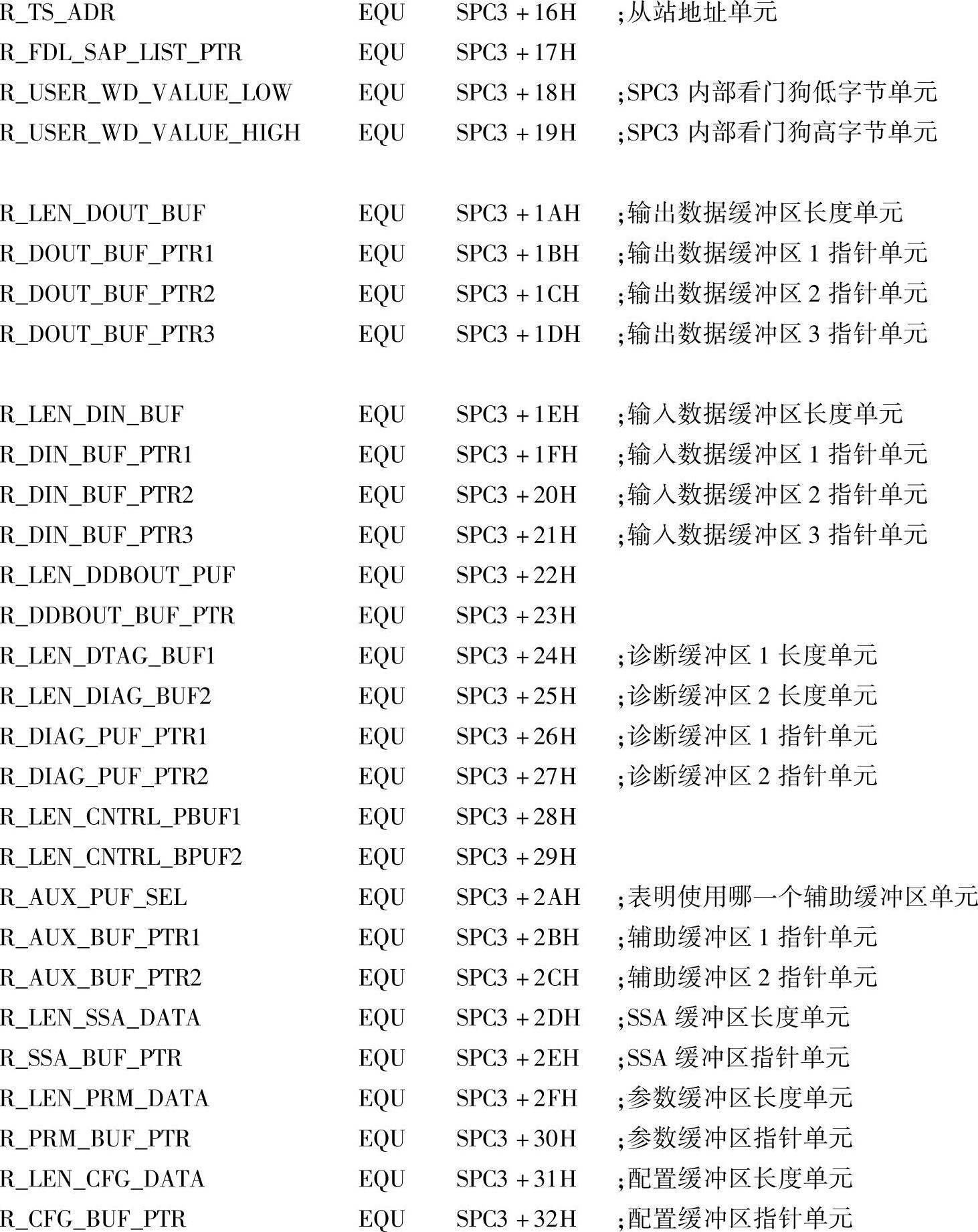
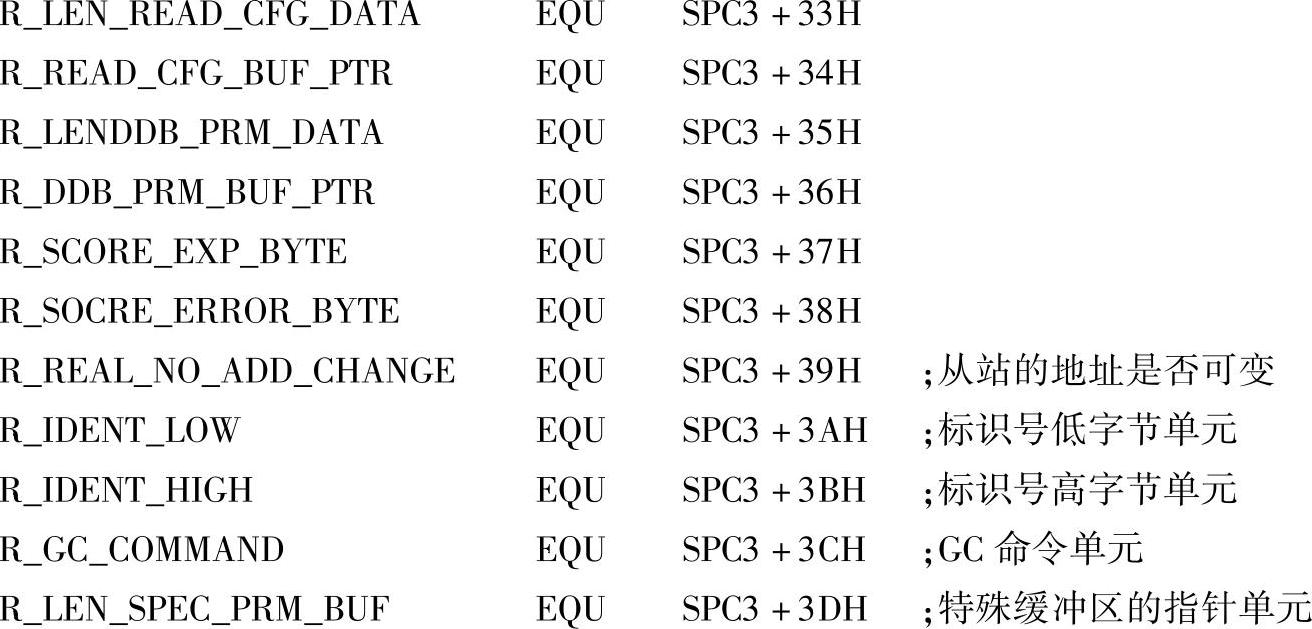
4)16H~3DH单元。
5)16H~3DH寄存器单元填充的数据。

(4)设置输入输出数据的长度
(5)程序开始
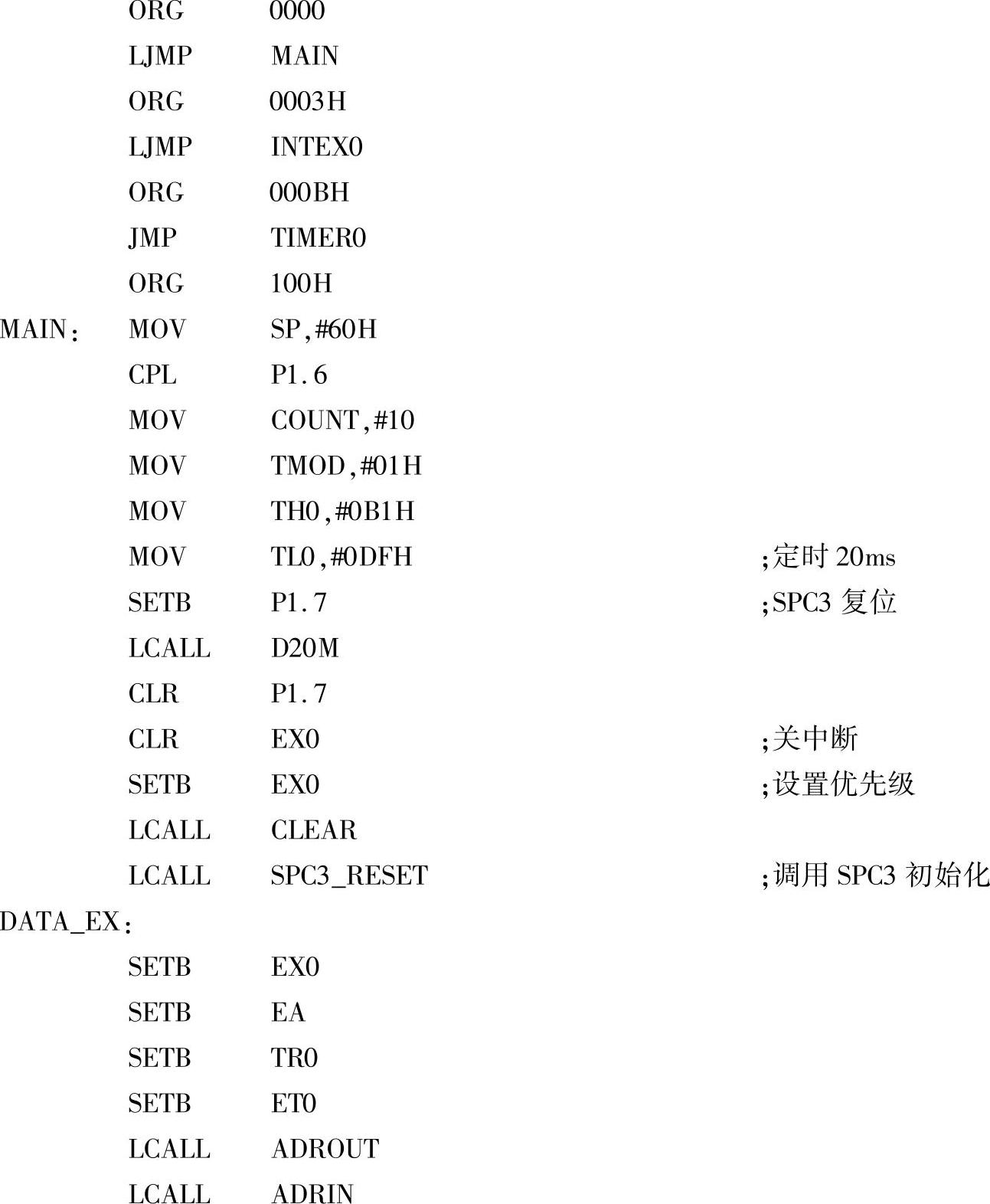
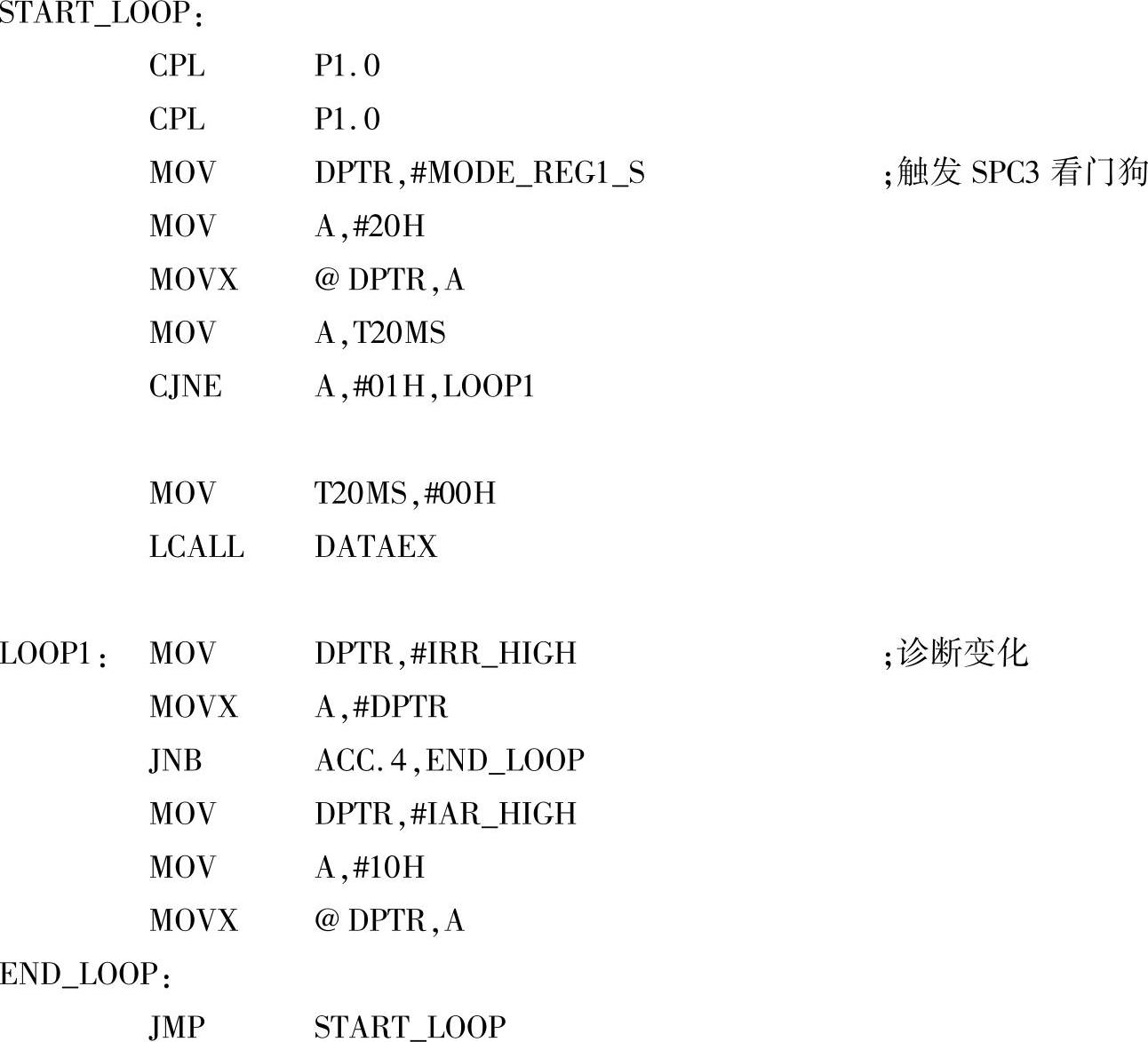
(6)主循环程序
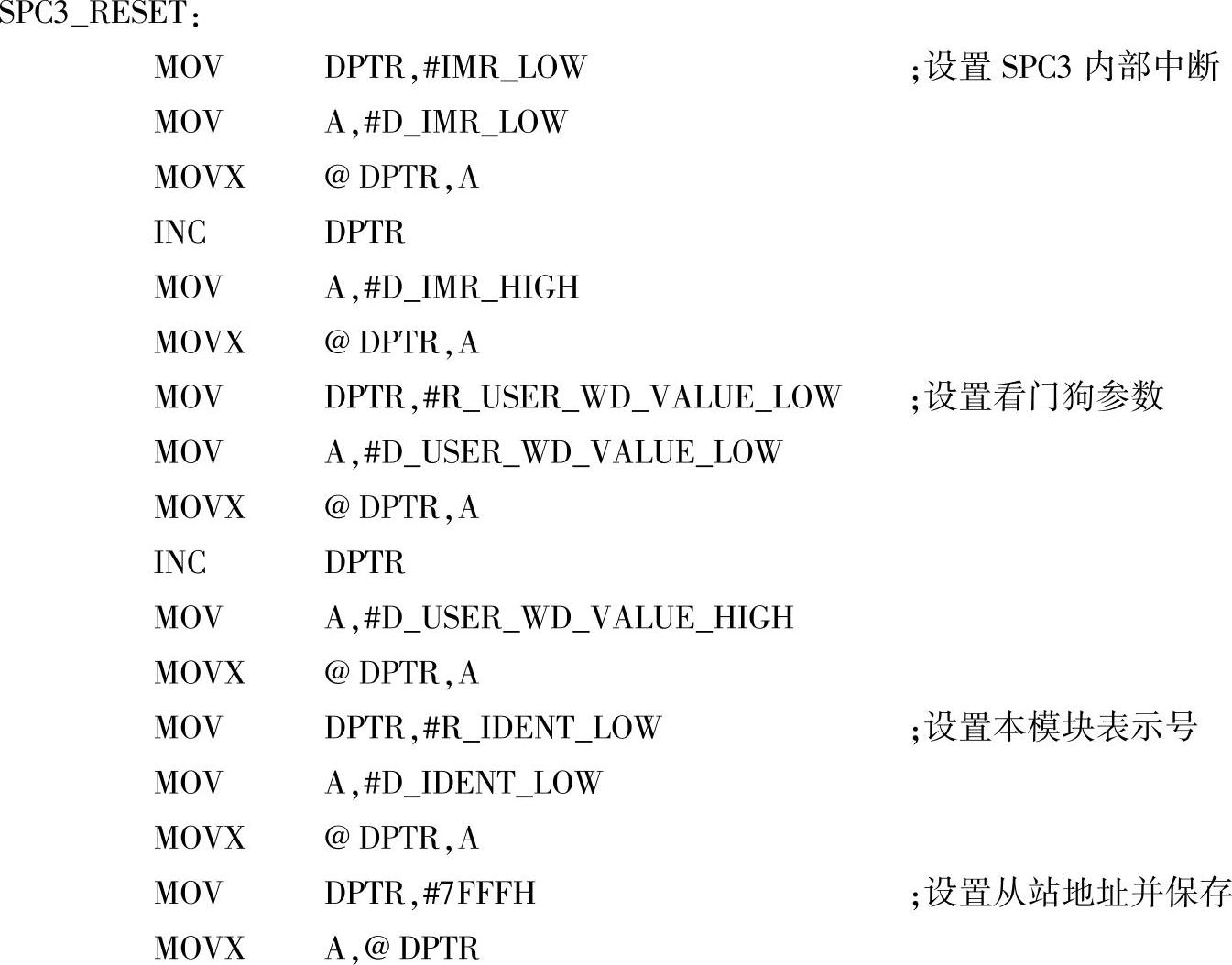
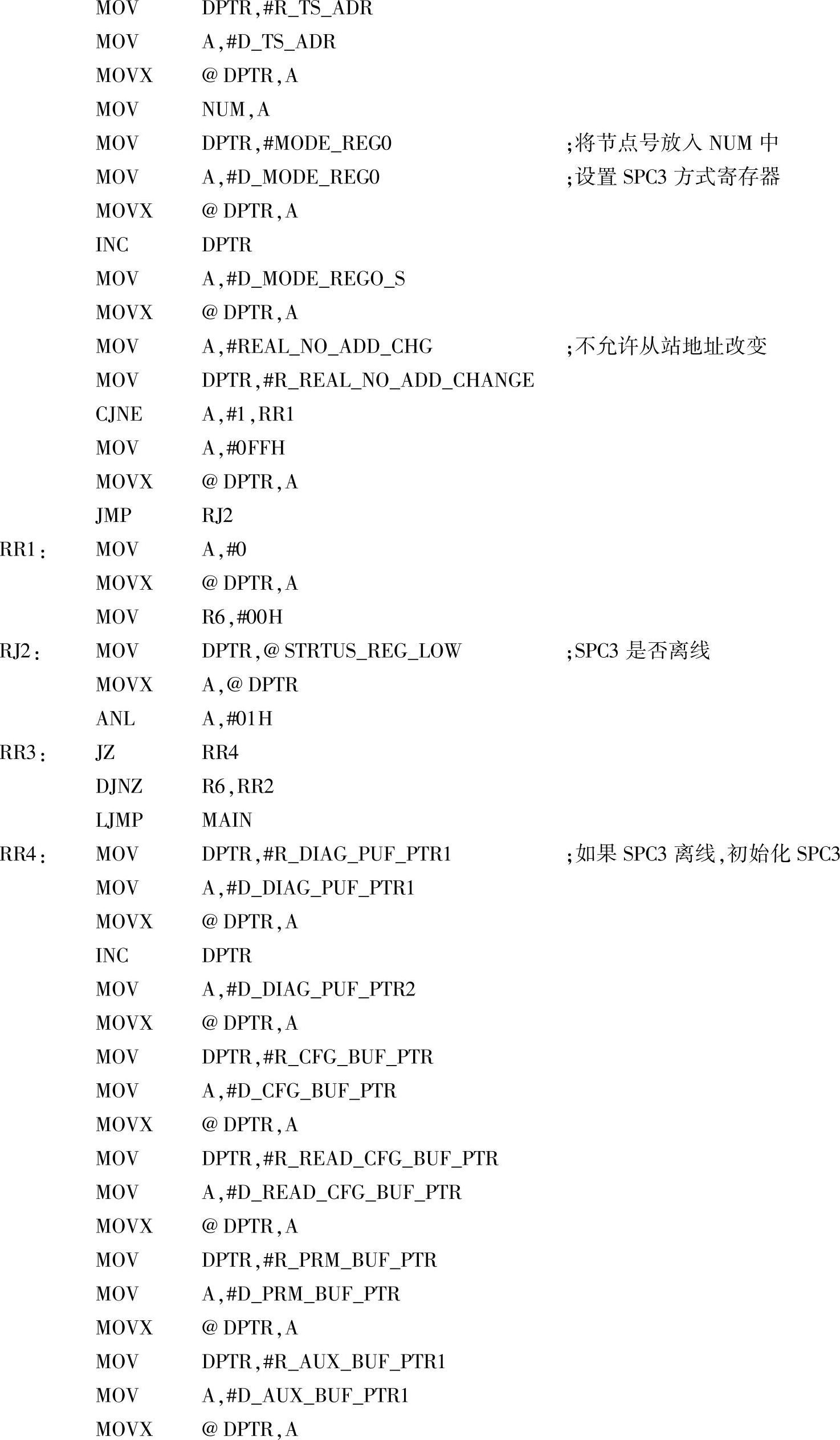
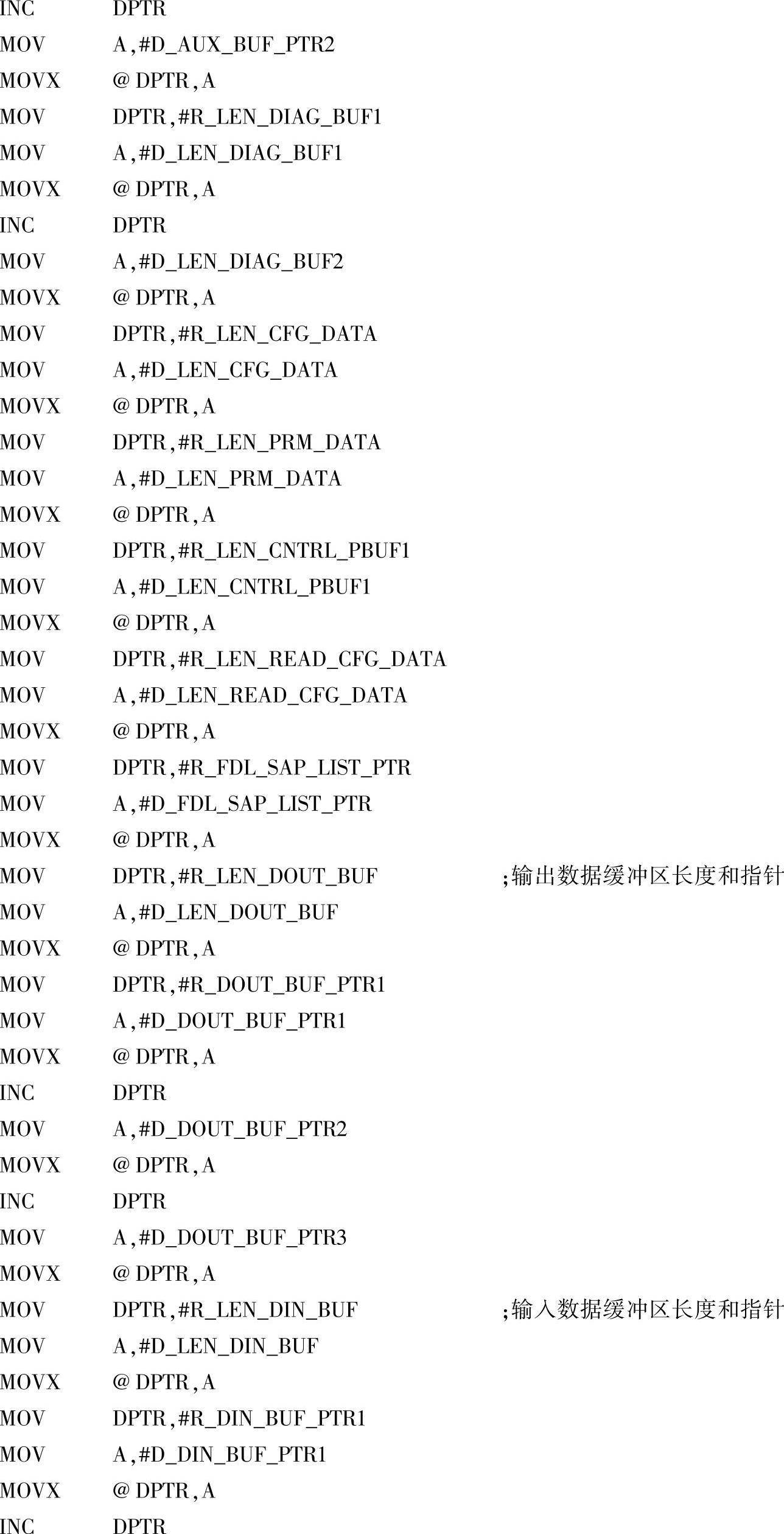
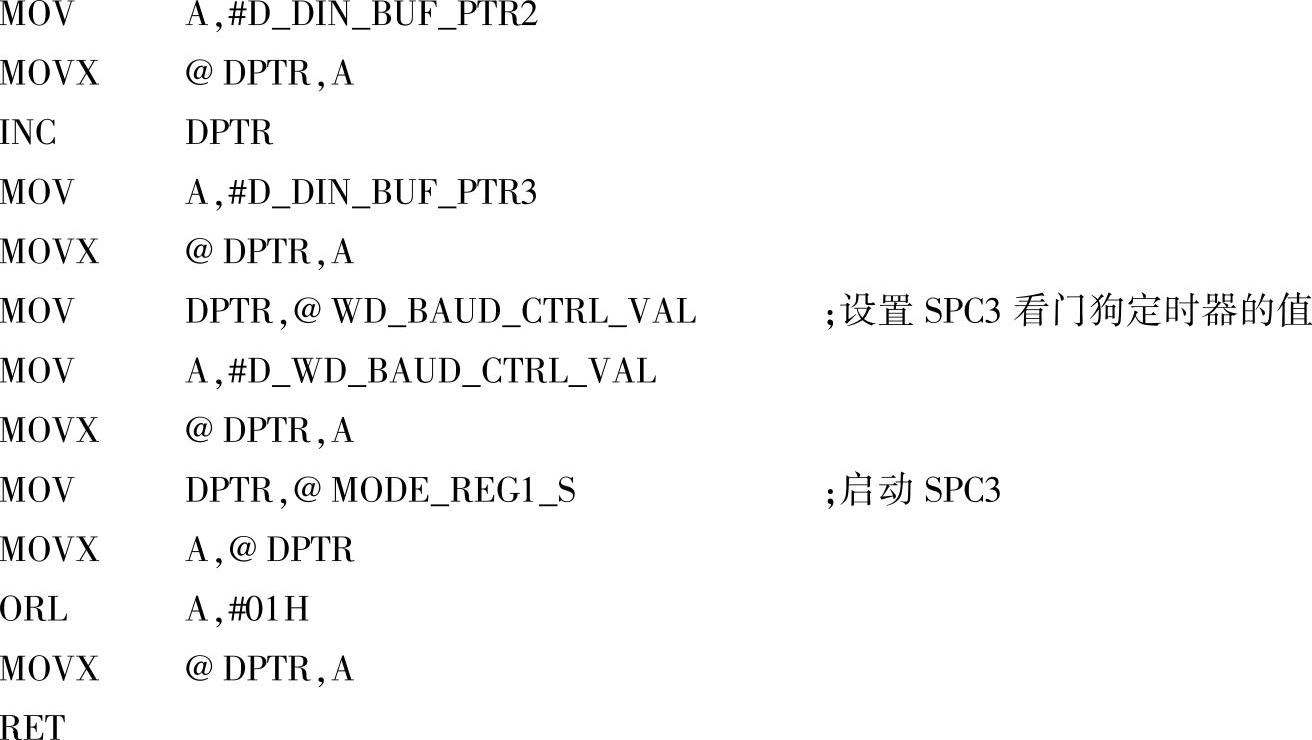
(7)SPC3复位程序
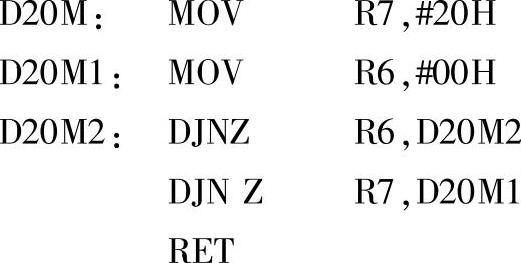
(8)延时子程序
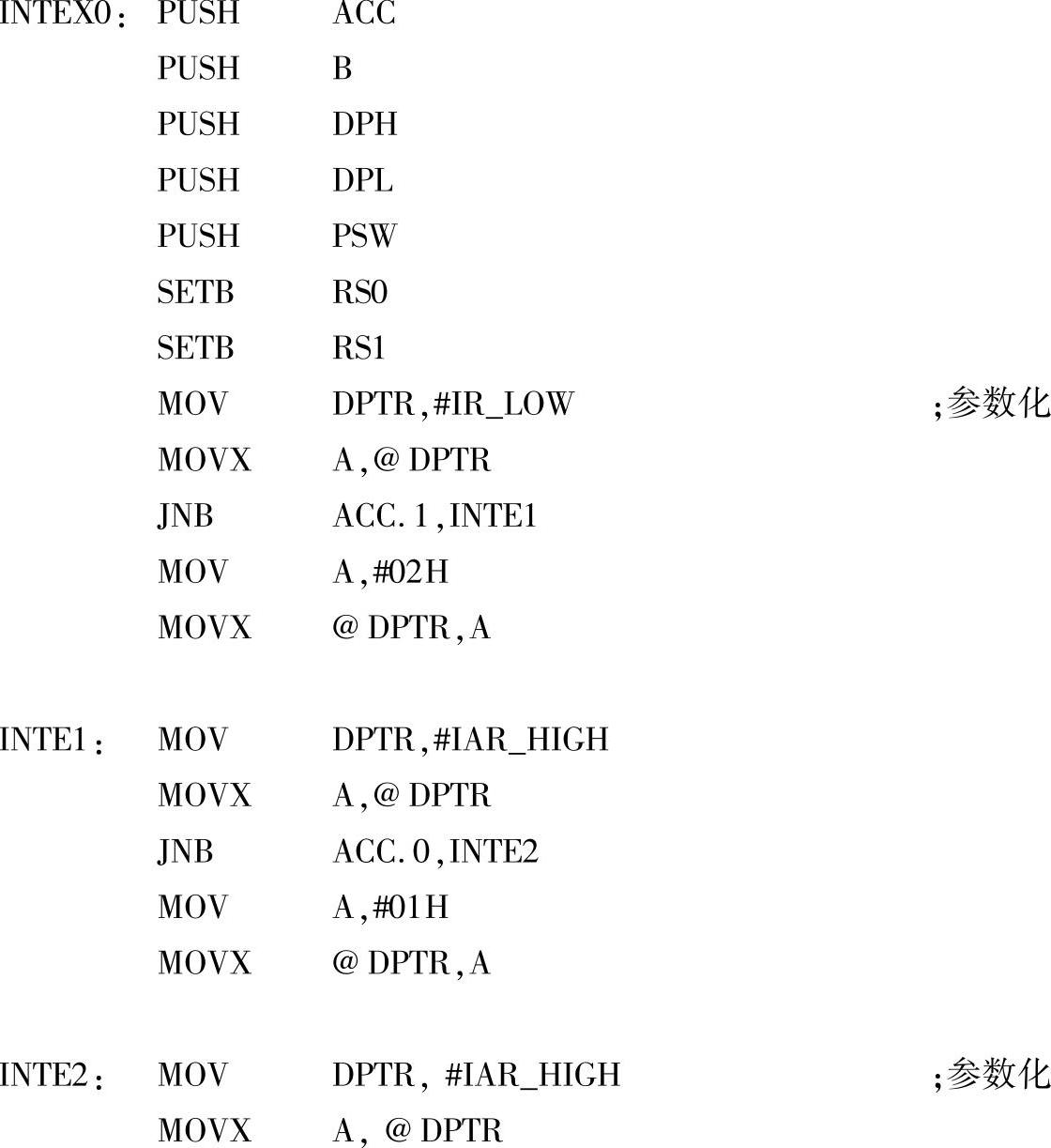
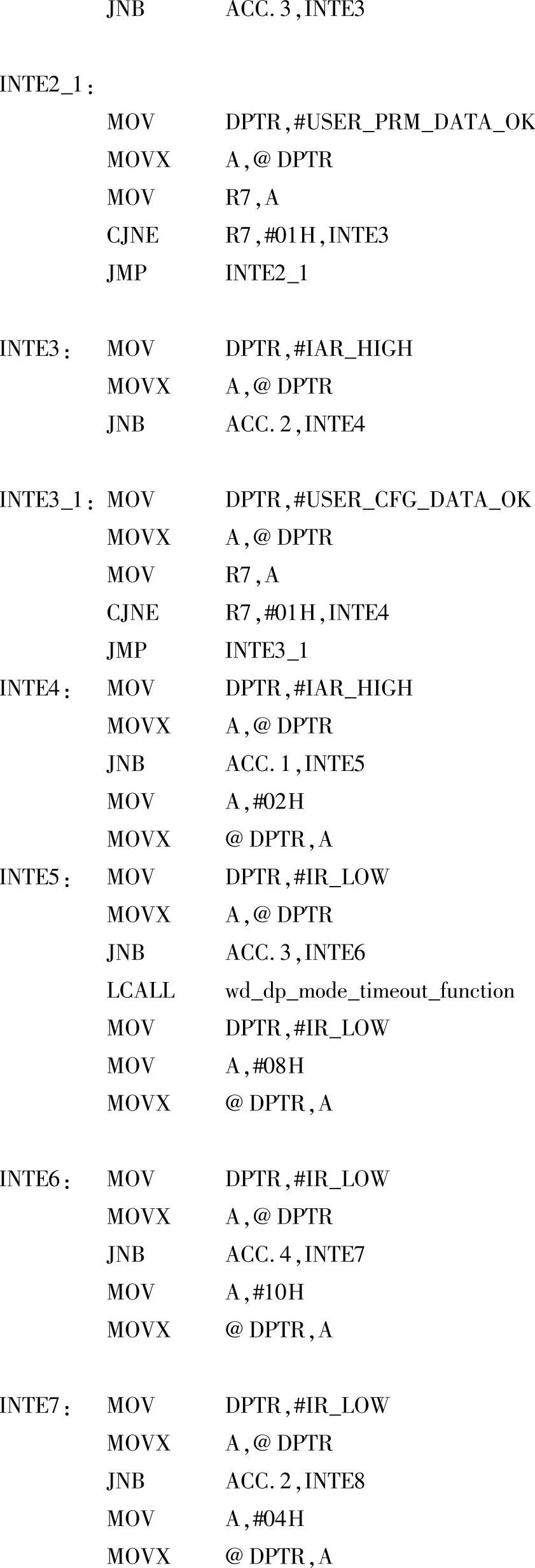
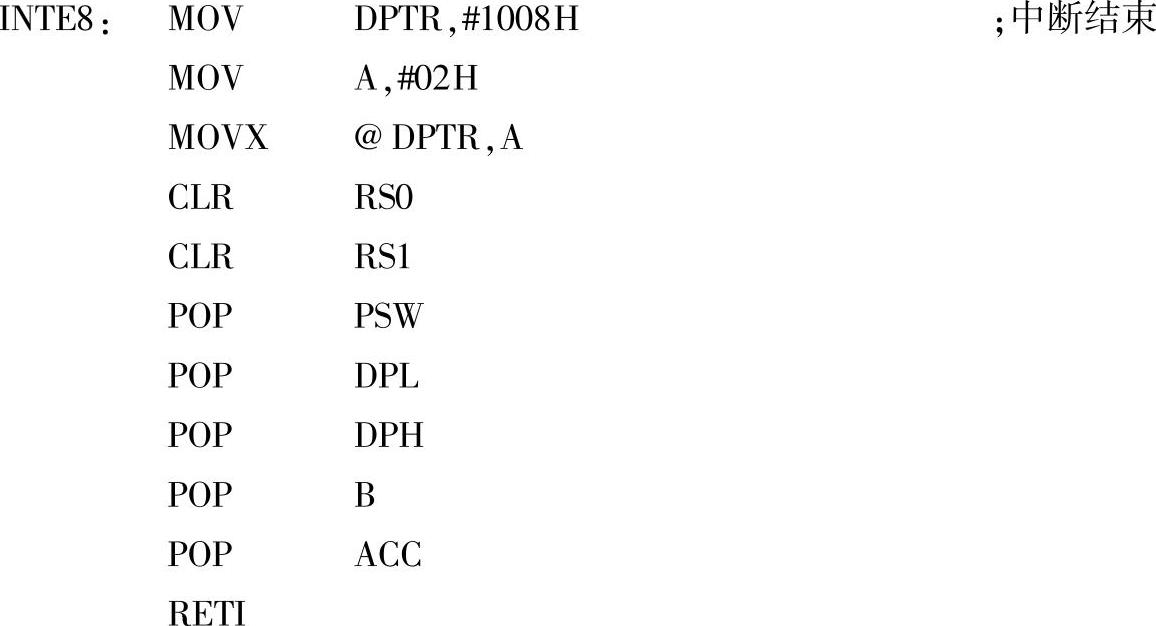
(9)SPC3中断断子程序
(10)更新输入数据缓冲区指针
(11)更新输出数据指针并将结果放到USER_OUT_PRT中

(12)清除SPC3内部的RAM
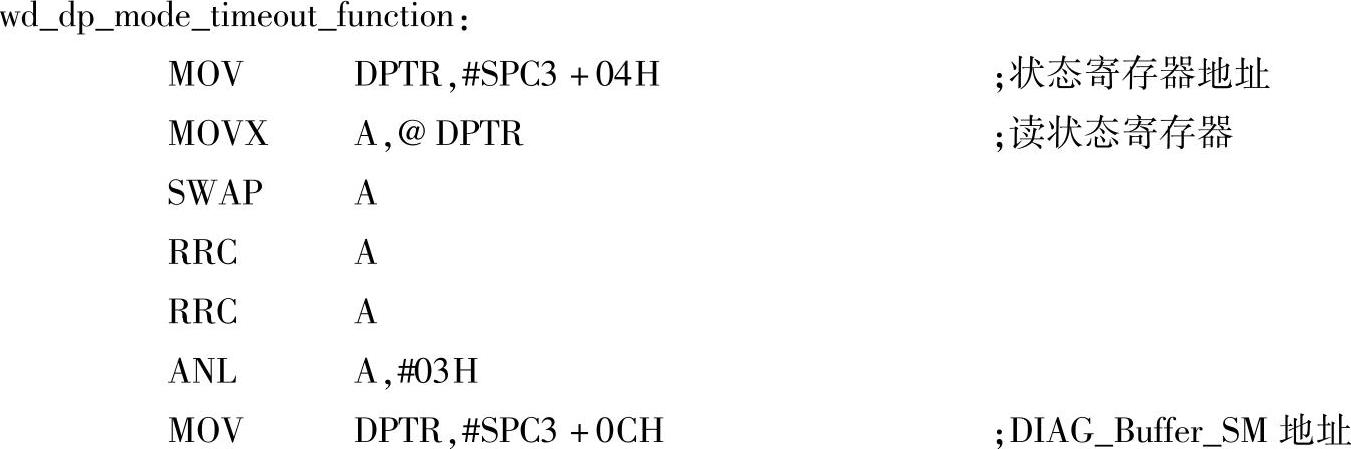
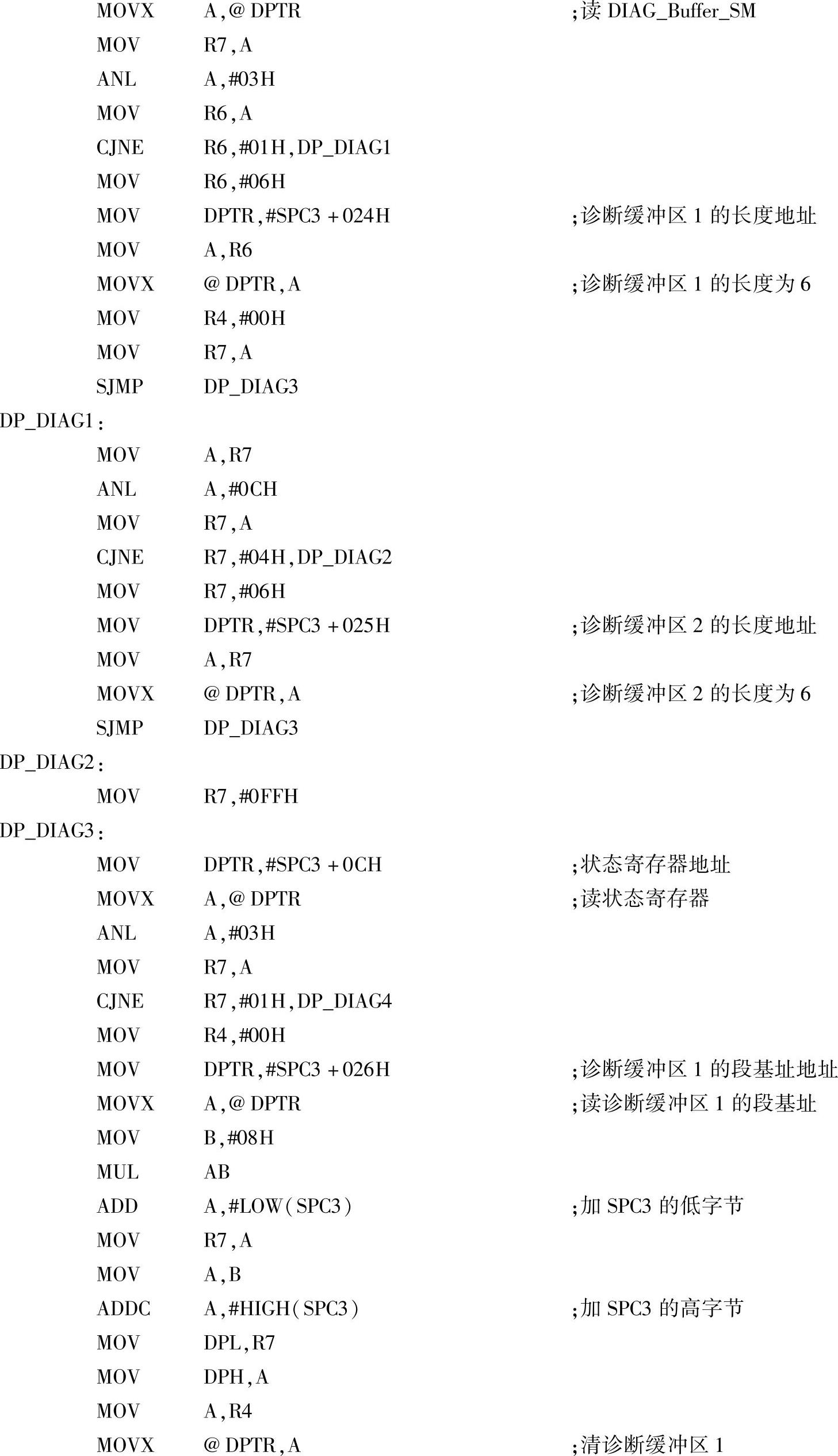
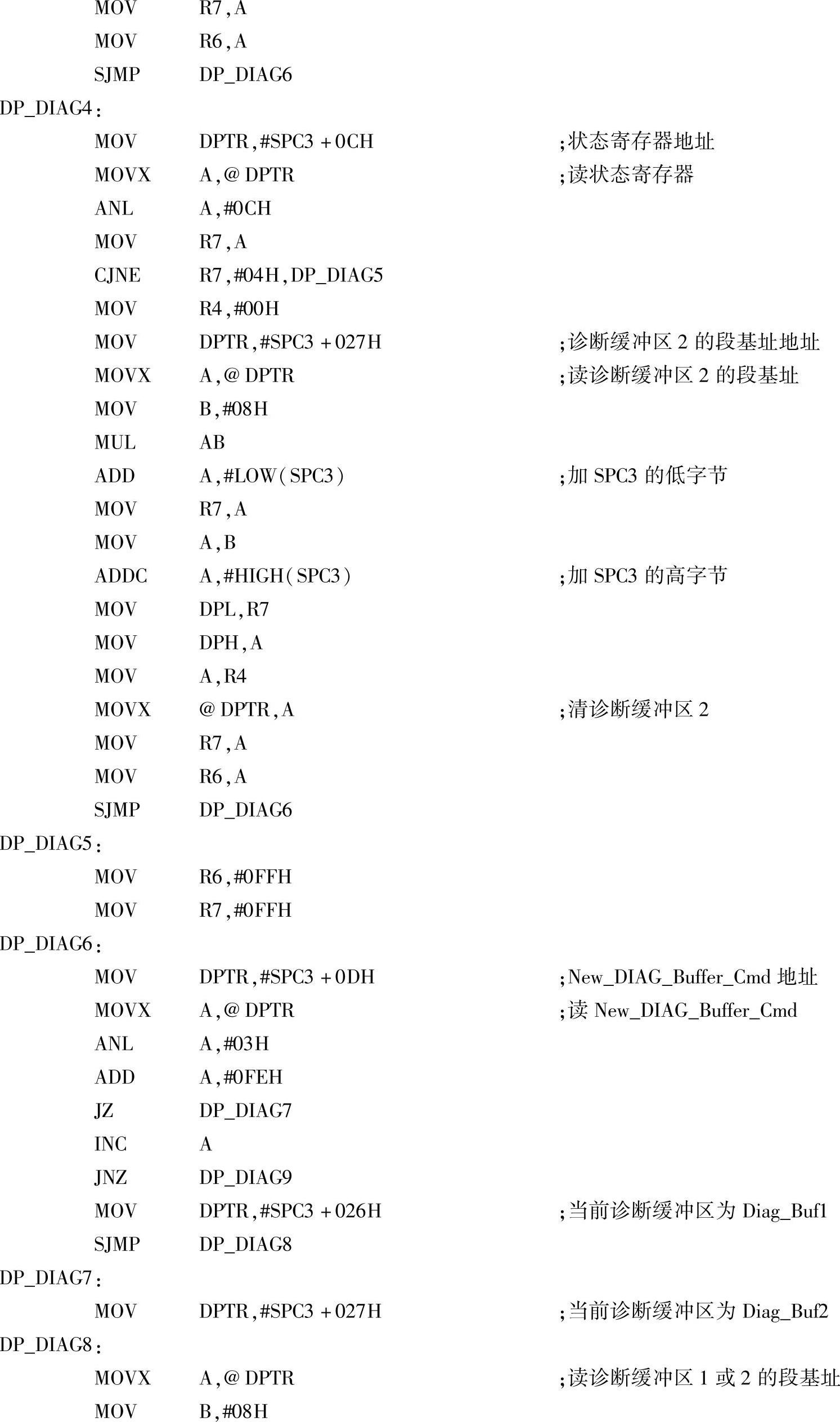
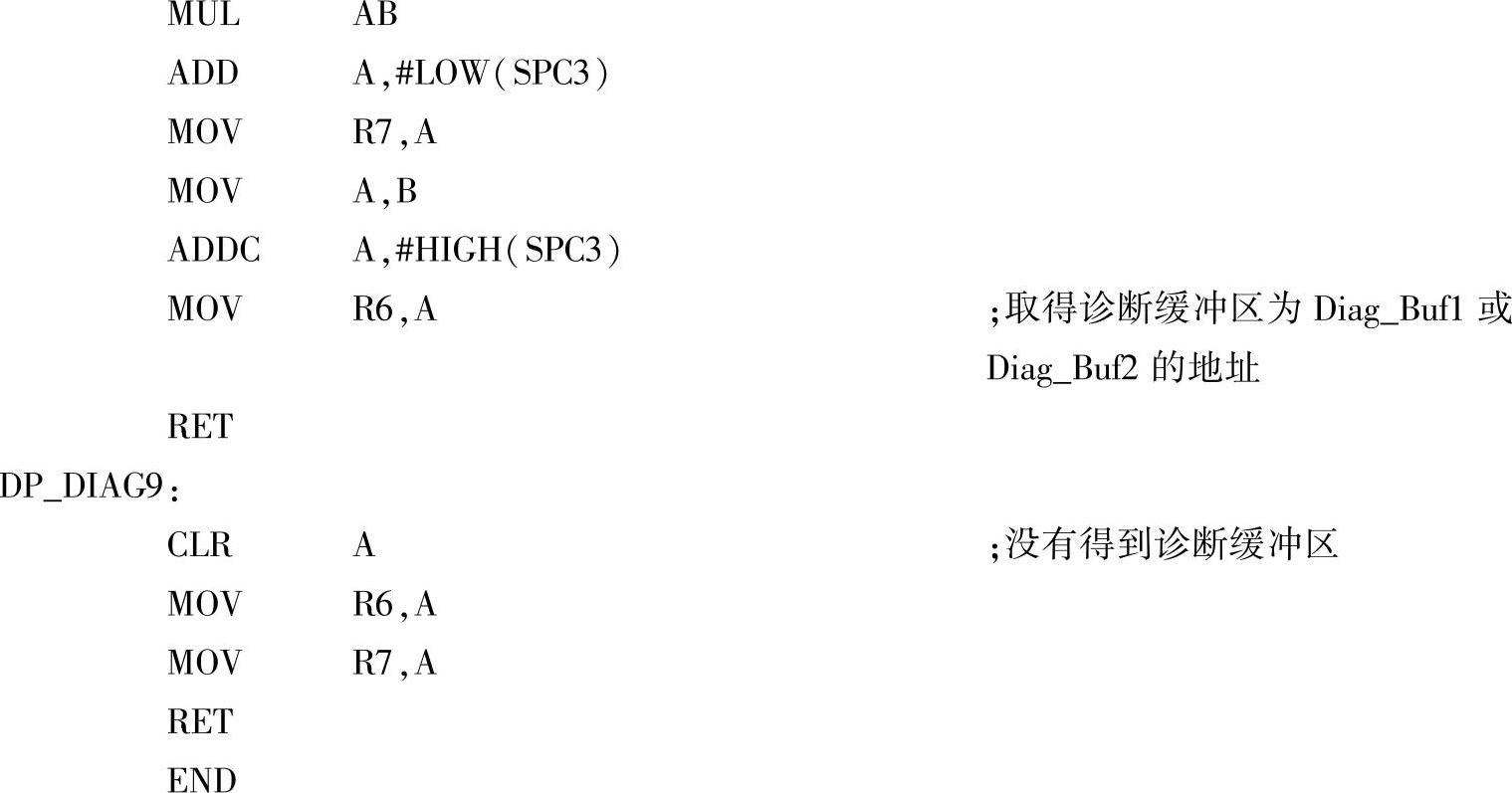
(13)wd_dp_mode_timeout_function子程序
相关文章

如图2-1所示,智能制造系统的整体架构可分为五层。控制系统主要包括适用于流程制造的过程控制系统、适用于离散制造的单元控制系统和适用于运动控制的数据采集与监控系统。图2-1智能制造系统架构3.PLM系统层它主要分为研发设计、生产和服务三个环节。......
2025-09-29

在完成了前期准备和交互方式设计的确定后,我们需要对智能产品自身的系统进行交互设计,设计出人们使用产品的交互方式相对应的系统交互,让人们能够清楚地意识到使用产品时产品的状态。本书结合智能产品的特点将智能产品系统的交互设计分为了四部分:系统架构、操作流程、界面布局、界面视觉。在智能产品界面的交互设计中。......
2025-09-29

在动作识别的过程中,舞蹈动作被看作一系列姿态的时间序列。在舞蹈交互系统中,无论是动作的识别还是动作的分析与评估,都需要采用一种有效的方式对动作进行清晰的定义和可量化的描述。在后续的舞蹈交互系统中,针对动作识别和动作评估这两个研究领域,笔者将使用不同的特征子集来进行有针对性的研究。......
2025-09-30

提供强大的人机交互功能,使设计师对智能设计过程的干预,即与人工智能融合成为可能。智能设计的关键技术包括设计知识表示、设计概念的符号化演绎与传递、设计意图的模糊交互、设计理性知识检索和大数据时代的设计知识智能挖掘等。针对设计知识大数据容量大、产生速率高、知识类型异构、准确性低的特点,从高维、海量、异构、非结构化设计资源中挖掘、搜索对设计者完成设计有价值的信息。图1-4智能制造的关键环节......
2025-09-29
所以在舞蹈评价方法中,我们要从姿态、节奏和力效三个方面进行分析,并在最后输出舞蹈学习者可以理解的指导语句。}gsr}0137-1.jpg}/gsr}其中,fk、fk分别表示关节运动状态的最大、最小值,这两个数值将参考人体生物力学以及舞蹈解剖学中对人体关节的定义和关节活动范围来设定。表3-2中的各关节特征值的极值范围,在实际测算过程中以舞蹈交互系统的空间坐标为准进行设定。......
2025-09-30

孔口标高应不低于百年一遇的防洪标高加0.5米安全余量。当热力管道采用蒸汽介质时,人员逃生口间距应不大于100米;敷设其他管道舱室逃生口间距应不大于400米。为免异物进入,加盖设置格栅网以防止危险性物质的进入,保证综合管廊安全运行。......
2025-09-30

图11-1 外墙身节点详图思路·点拨建筑详图一般又被称为“细节的解释”,故还有一种叫法为放大图。而墙身详图可以从室内外地坪、防潮层处画到女儿墙压顶。为了节省图样,在门窗洞口处可以断开,也可以重点绘制几个重要的节点,以指导施工。图11-4 绘制檐口抹灰1使用命令和命令,修剪外轮廓的线条,并把内圈线宽调节为,结果如图11-5所示。图11-7 绘制防水层执行命令,设置半径为10mm,把外层直线倒成圆角,并删除多余直线,结果如图11-8所示。......
2025-09-30
相关推荐