在他们的实验中,专业舞者动作的特征向量和初学者动作的特征向量显示出很大的差异,这证明该方法对日本民族舞蹈动作的分类识别是有效的。图3-1 动作评价系统架构本章从舞蹈教学的需求出发,将拉班动作分析理论与舞蹈教学中常用指导用语的特点结合,提出一个基于拉班运动分析理论的动作评估模型。......
2023-10-29
在BESS模型中,“身体”这一部分对身体组织进行一般性说明,它负责描述哪些部位正在移动、哪些部位相连、哪些部位受到他人的影响、各部位之间的运动顺序是什么。由于本书的舞蹈数据是通过Kinect动作传感器采集的,因此本书采用通用的三维人体骨架模型作为人体结构的基本模型。该模型由20个骨骼关节点(简称节点)组成(见图1-2),各个节点之间采用树状层次结构进行连接,hip节点(hip-center)为整个人体骨架的根节点,从hip节点开始,向人体骨架的各个子关节逐层延伸,形成根节点的各个子树。其中,骨架的hip节点包含了三个平移量和三个旋转量,hip节点的平移量的变化决定了人体运动的变化轨迹,而旋转量决定了人体在空间中的朝向,其他子节点则通过其相对于它的父节点的旋转量来表示自身的方向。
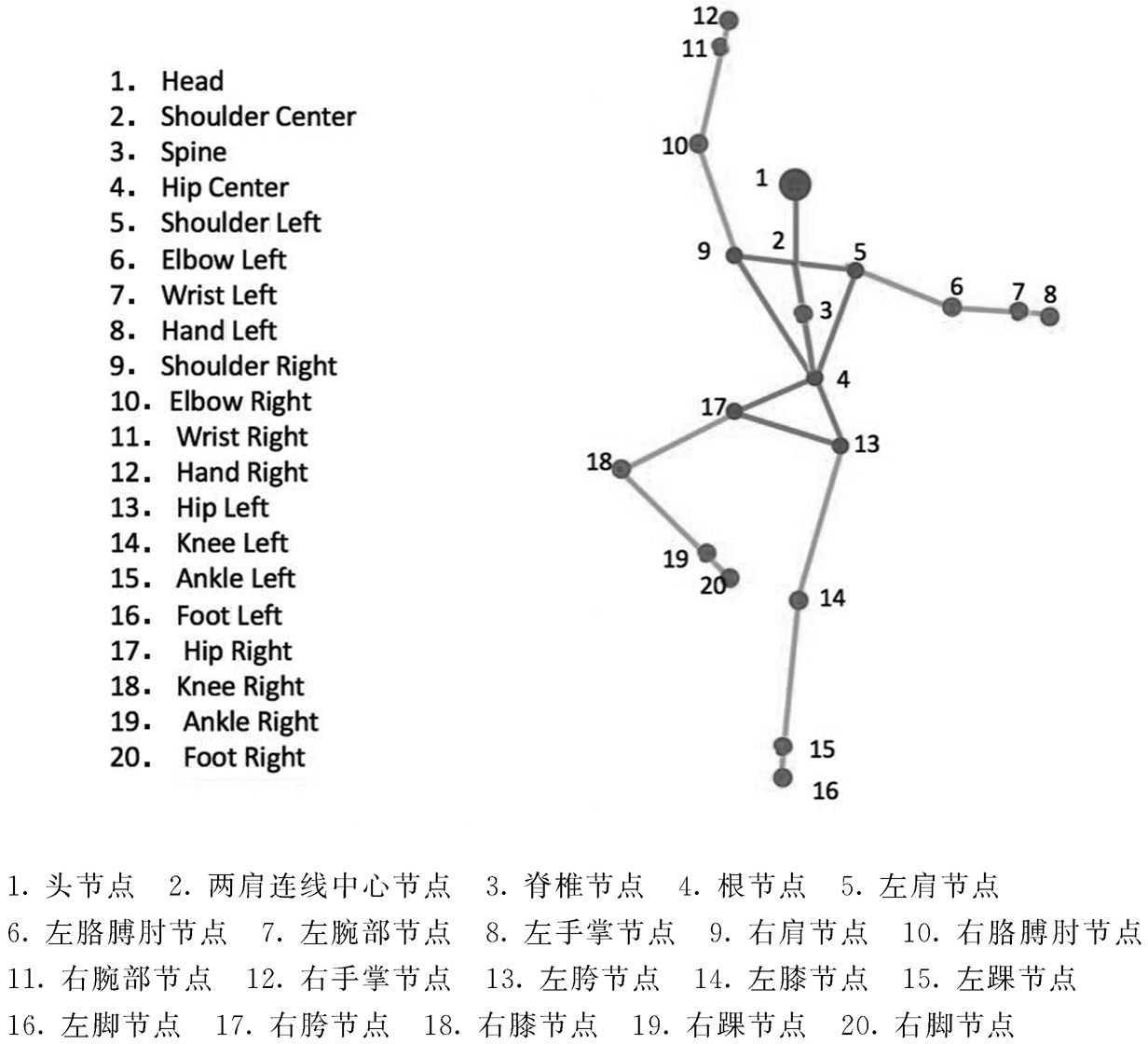
图1-2 人体骨骼节点
动作传感器采集到的人体运动数据可以被看作在一个持续时间段内采样得到的一个持续的人体动态姿势序列帧组合,每一帧的姿势都是人体关节点的底层信息数据集。这样,任意帧的人体姿态可表示为:
}gsr}0057-2.jpg}/gsr}
其中, 、
、 分别是平移量和旋转矩阵,它们代表了骨骼的hip节点的位置信息和旋转信息。其他非hip节点的空间位置可以通过公式(2)的三维变换公式得到:
分别是平移量和旋转矩阵,它们代表了骨骼的hip节点的位置信息和旋转信息。其他非hip节点的空间位置可以通过公式(2)的三维变换公式得到:
}gsr}0057-5.jpg}/gsr}
其中 表示i时刻关节Nj的世界坐标;
表示i时刻关节Nj的世界坐标; 、
、 表示i时刻hip节点的平移和旋转变换矩阵,
表示i时刻hip节点的平移和旋转变换矩阵, 、
、 表示初始时刻Nk节点相对于其父节点的局部偏移变换矩阵和旋转变换矩阵,
表示初始时刻Nk节点相对于其父节点的局部偏移变换矩阵和旋转变换矩阵, 表示初始时刻Nj的相对偏移量。
表示初始时刻Nj的相对偏移量。
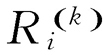
在“形态-力效”的描述方法中,“形体”的部分主要用来分析人体姿态在空间中的动态变化,它着重描述身体的外在形态、身体的各个部分的相互关系,以及在运动中身体的某一个部位如何变化才能保证其他部位到达合理的位置。为了分析人体的姿态变化,本书把人体分成了10个部分,通过描述这10个身体部分的关系来表示人体的外形信息。如图1-3所示,躯干被处理为上躯干和下躯干(胯部)两部分,其余部分包括左/右大臂、左/右前臂、左/右大腿和左/右小腿。其中下躯干为人体的腰部,是人体动作的根部位,本身运动变量较少。下文主要介绍躯干特征。
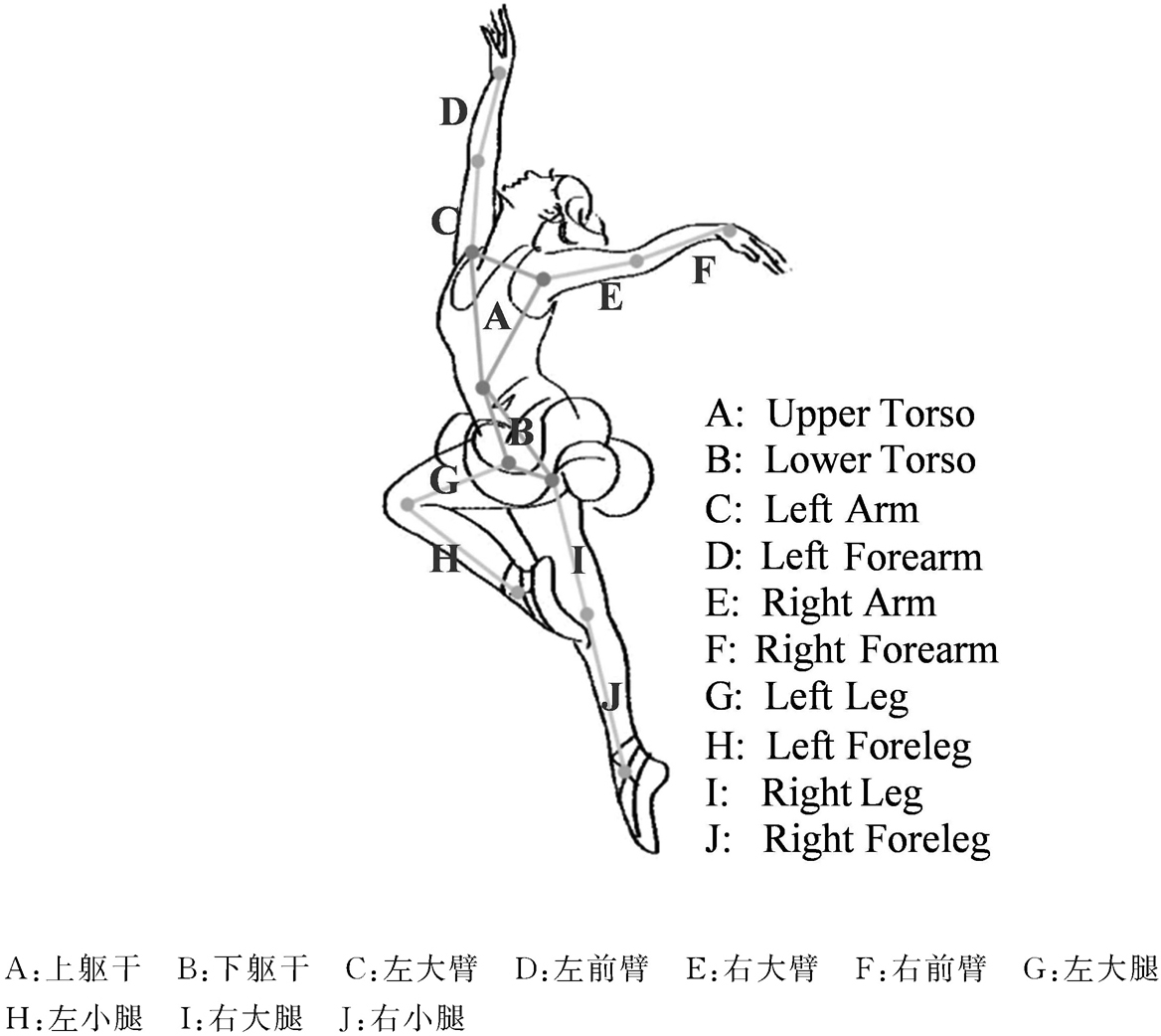
图1-3 姿态的组成部分
躯干包含了背部、腰部、胸部和肩部等部位,在人体运动中起到稳定重心、传导力量、发力和减力等作用,对于人体在运动过程中保持平衡有着重要意义。[9]在前文的人体基本骨骼模型中,用来描述人体躯干的节点独立性弱,因此躯干自身的姿态变化主要通过胸部(肩部)相对于腰部的变化来体现,且运动幅度比较小。在力学分析、医疗等领域,研究者主要是通过分析这种运动变化了解躯干各个部位的肌肉变化,而不是实际空间意义上的变化。如果不充分关注动作的细节,躯干的运动状态便可能被忽略。然而在舞蹈表演中,舞者经常以各种方式弯曲、倾斜或旋拧他们的躯干,通过这样的动作来表现富有魅力的形体之声。[10]以下是舞蹈动作中比较突出的三种躯干动作。
如图1-4(a)所示,所谓躯干的侧倾,是以腰椎为动作轴,以腰部为参考点,胸部向侧方弯曲。观察动作外在呈现的变化可以发现:双肩体现了侧倾的“自由度”,头部跟随胸部脊椎线运动。
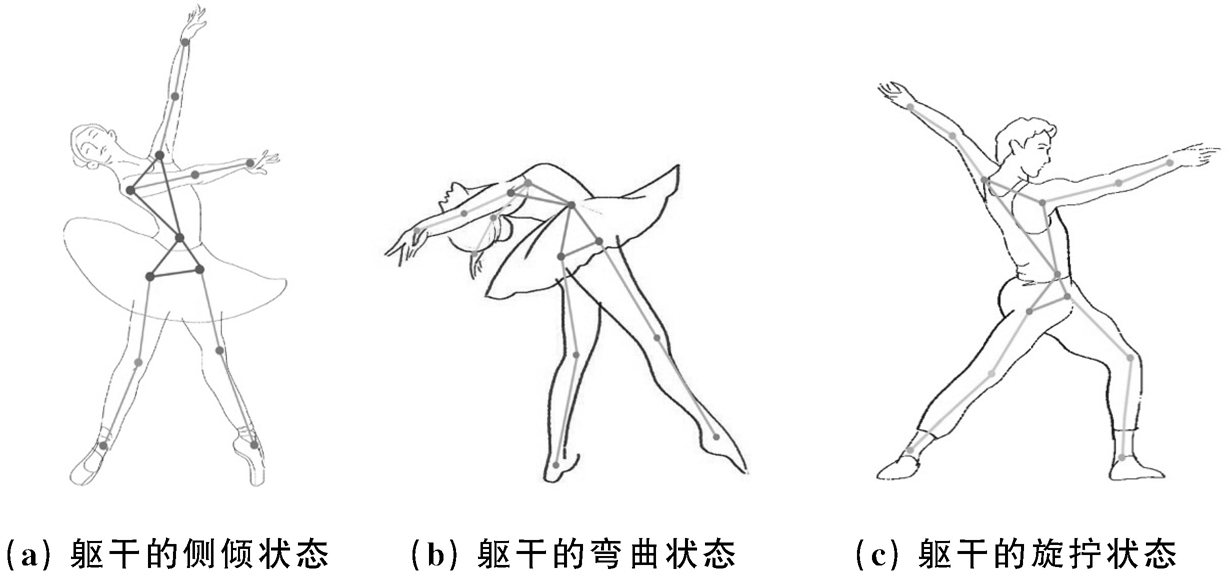
图1-4 躯干的不同状态
如图1-4(b)所示,躯干的弯曲状态和侧倾相似,所不同的是,胸部为向前或者向后的倾倒状态。理想状态下,双肩和腰线大致平行。
如图1-4(c)所示,躯干的旋拧是指胸部的旋转程度大于腰部的旋转程度,腰部和胸部朝向不同的方向。旋拧的程度可以通过肩膀线和腰线的夹角判定。通常,胸部的拧动角度不能超过腰部拧动角度的1/16,这个部分在动作评估的时候对舞蹈的力度会有所影响。[11]
图1-5 人体上下躯干坐标系
为了描述以上躯干部分的姿态变化,我们可以把躯干理解为上下两个刚体——上躯干(胸部)、下躯干(腰部)。如图1-5所示,我们首先让双肩节点和hip节点这三个节点构成一个上躯干平面,以肩部节点连线为准,建立正交坐标系的X轴,以从左到右的方向为X轴的正向;而穿过hip节点、垂直于肩部节点连线方向的线为Y轴,方向为从下到上;该正交坐标系的Z轴为前两个方向轴的叉积,即Zu=Yu×Yu。因此,我们建立了一个上躯干的正交坐标系{Xu,Yu,Zu}。使用相同的方法,以hip节点和左右腰侧这三个节点构建一个三角平面,腰部连线作为下躯干坐标系的X轴,方向为从左到右;穿过hip节点、垂直于腰部连线的线为Y轴(向上为Y轴正方向),Z轴为Zl=Xl×Yl,下躯干的正交坐标系为{Xl,Yl,Zl}。
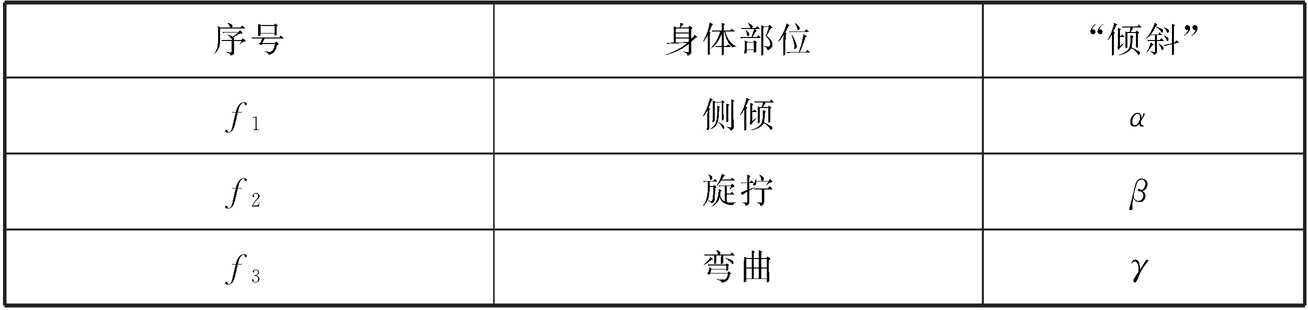
为了计算躯干的姿态特征,在图1-6中,我们将上躯干坐标系{Xu,Yu,Zu}投影到由下躯干坐标系构成的(Xl-Zl)、(Xl-Yl)和(Yl-Zl)平面上,从而获得了一个临时的投影坐标系{X′u,Y′u,Z′u}。{Xl,Yl,Zl}坐标系和{X′u,Y′u,Z′u}坐标系的对应坐标轴之间的夹角{α,β,γ}可用来表示舞者躯干的三个状态,其中X’u和Xl的夹角(α)表示身体侧倾的程度,Y’u和Yl的夹角β表示身体旋拧的程度,Z’u和Zl的夹角γ表示身体弯曲的程度。我们针对躯干状态提取了如表1-1所示的躯干特征集合。
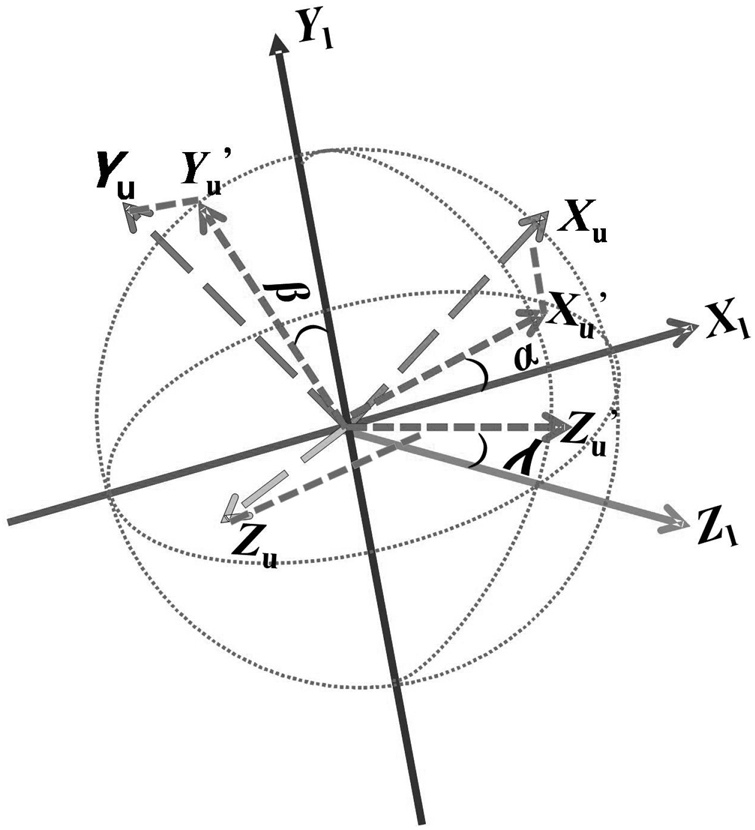
图1-6 躯干特征集合
表1-1 躯干特征集合
在舞蹈表演中,为了展现舞者的情绪及其与周围环境的关系,动作相对来说比较夸张,手臂和腿收缩与伸展的幅度比躯干大。由于大臂和大腿直接和躯干相连,它们的变化是以上下躯干为轴点进行的,因此我们将与躯干相连的大臂和大腿设为一级关节,其中左右大臂以上躯干坐标系{Xu,Yu,Zu}为参考坐标系,大腿的参考坐标系则是下躯干的正交坐标系{Xl,Yl,Zl}。
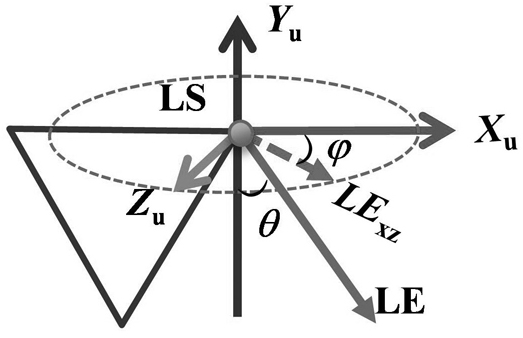
图1-7 左大臂对应坐标系
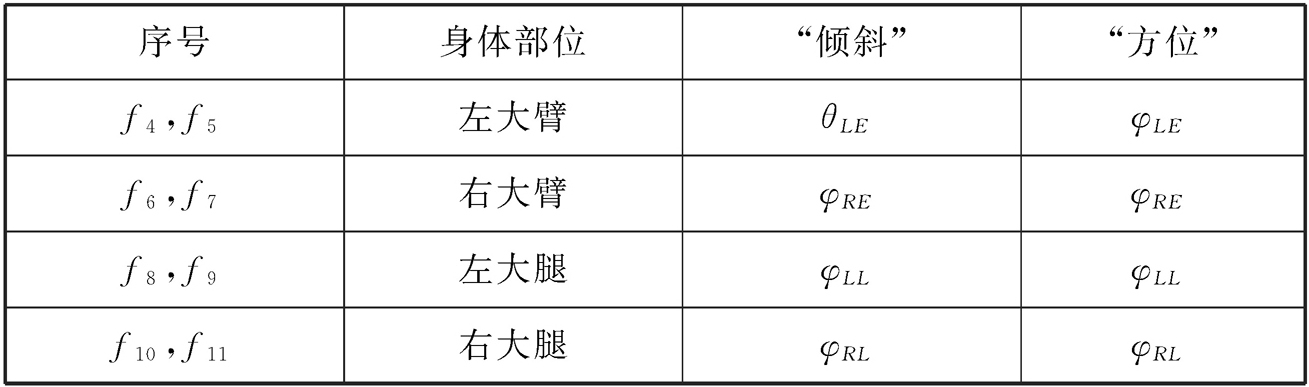
以左大臂为例,如图1-7所示,{Xu,Yu,Zu}坐标系的原点调整为左肩节点(LS),LE表示左胳膊肘节点, 表示左大臂。
表示左大臂。 和Yu轴之间的夹角θLE表示左大臂的“倾斜”状态。把
和Yu轴之间的夹角θLE表示左大臂的“倾斜”状态。把 投影到(Xu-Yu)平面上,投影线
投影到(Xu-Yu)平面上,投影线 和Xu轴之间的夹角φLE用来描述大臂的“方位”。以此类推,采用相同的方法,我们可以得到如表1-2所示的8个有关一级关节的特征描述。(www.chuimin.cn)
和Xu轴之间的夹角φLE用来描述大臂的“方位”。以此类推,采用相同的方法,我们可以得到如表1-2所示的8个有关一级关节的特征描述。(www.chuimin.cn)
表1-2 一级关节特征集合
人体的前臂或小腿,因为相对于一级关节来说远离躯干并且和一级关节相连接,所以被称为二级关节。如图1-8所示,以左前臂为例,首先基于左大臂建立一个左前臂的局部正交坐标系,肘关节(LE)作为坐标原点,左大臂 所在的向量为坐标系的Y轴(Yuu),Xuu是上躯干坐标系中的坐标轴Xu投射到垂直于Yuu的
所在的向量为坐标系的Y轴(Yuu),Xuu是上躯干坐标系中的坐标轴Xu投射到垂直于Yuu的 平面上的投影线,Zuu轴为前两个方向轴的叉积,Zuu=Xuu×Yuu。在新的坐标系中,
平面上的投影线,Zuu轴为前两个方向轴的叉积,Zuu=Xuu×Yuu。在新的坐标系中, 表示左前臂,则Yuu轴和
表示左前臂,则Yuu轴和 之间的夹角θLW将被提取以描述左前臂的“倾斜”状态;把
之间的夹角θLW将被提取以描述左前臂的“倾斜”状态;把 投影到(Xuu-Yuu)平面上,得到
投影到(Xuu-Yuu)平面上,得到 ,它和Xuu之间的夹角φLW表示左前臂的“方位”。由此,我们得到如表1-3所示的8个二级关节的特征向量。
,它和Xuu之间的夹角φLW表示左前臂的“方位”。由此,我们得到如表1-3所示的8个二级关节的特征向量。
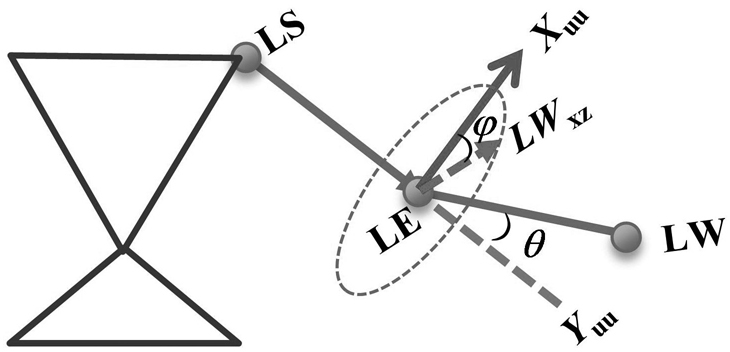
图1-8 左前臂的局部坐标系
表1-3 二级关节特征集合

通过以上的方法,我们首先就舞蹈动作中的姿态部分进行了特征提取,一共得到19个特征值。通过姿态的特征集合,我们可以对舞蹈姿态的动态变化有一个基本的理解。如图1-9所示,这是一段手臂模仿燕子飞的舞蹈动作,图中展示的是该动作的左/右大臂的倾斜特征变化曲线以左/右大腿的倾斜特征变化曲线。我们可以看出,在这个舞蹈动作中,腿部没有伸展动作,手臂做出了两次比较明显的上下摆动,每次手臂摆动时以踩踏式步伐前进。
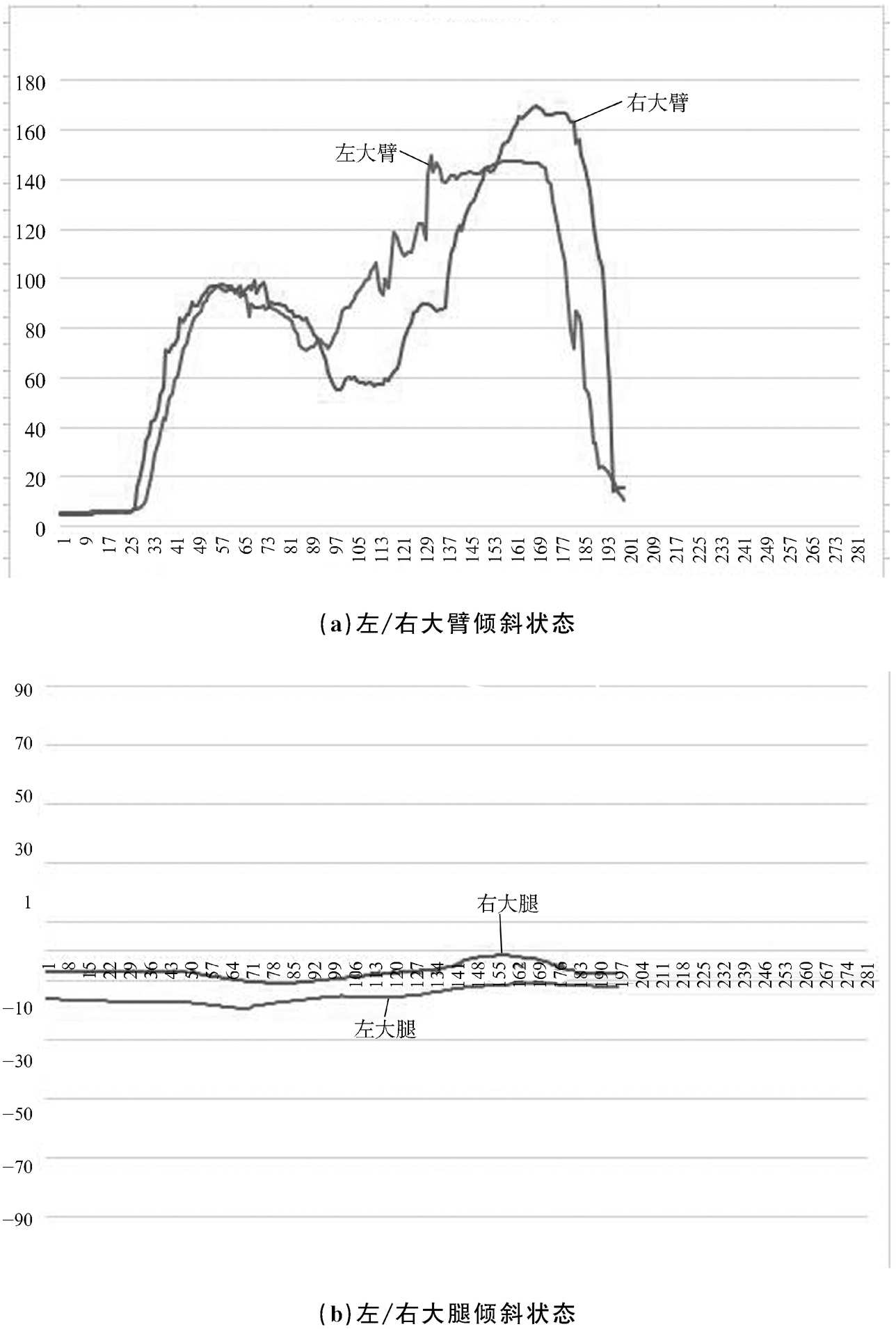
图1-9 燕子飞动作的手臂、大腿的倾斜特征值
在“形态-力效”的描述方法中,“空间”的部分主要用来描述动作所占用的空间,其与运动的路线有关,也可以表现舞者在表演过程中对环境的感觉,因此我们采用以下三个概念来计算舞者所占用的空间。
运动的距离表示一段时间内,随着时间的持续而累积生成的舞者的运动曲线的长度,具体的测量方式为计算hip节点的空间轨迹投影到地面的曲线的长度。这样可以防止垂直方向的动作例如跳跃被错误地视为舞者所占用的空间。在公式(3)中,Lhip(n)表示第n帧时hip节点的轨迹投影到地面的长度。
}gsr}0067-1.jpg}/gsr}
运动的面积表示舞蹈动作在运动持续时间内所覆盖的地面面积。我们通过人体四肢末端关节点垂直投影到地面所构成的四边形面积的变化来表示该动作所覆盖的区域的大小,利用公式(4)求得此四边形的面积。
}gsr}0068-1.jpg}/gsr}

图1-10 四肢覆盖的面积
其中,a、b、c、d分别为双手、双脚、左手和左脚、右手和右脚投影到地面后形成的四边形的边长(见图1-10),s为半周界,即 ,而φ、ω为其中的两个对角。
,而φ、ω为其中的两个对角。
运动的高度主要表明舞蹈动作的空间高度特性,我们可以通过hip节点的f22=yhip(t)坐标值来判断。对于跳跃的动作,舞者的运动高度将会有很大变化。因此,我们将hip节点的运动路线、身体覆盖的面积、跳跃的高度三个元素结合起来计算该舞蹈动作所覆盖的空间。该特征子集的状态和实际的表演环境之间关系紧密,通常作为舞蹈分析的次要条件。
力效主要用于描述动作的力量变化给动作的意图、感觉、质感带来的影响。可以从时间、空间和肌肉能量等要素出发,对动作进行比较科学的分析和描述。拉班的“力效”理论由四个子类别构成,即重力、流畅度、空间和时间。每个子类别都包含两个极端状态,它们均被称为力效因子。
重力是人体在地心引力的作用下产生的动作的轻、重质感,在运动的过程中显示出的力度感就是力效中的重力,它的两极分别是轻盈和有力。运动过程中人对自身重量进行最大限度的抵抗时会产生强而有力的动势,这就是重力因子中的“强”或“重”;而逐渐减轻这种对重力的抵抗,利用“轻心”进行运动,将产生轻盈的无重力感,这就是重力因子中的“轻”或“弱”。
笔者将通过研究身体的运动减速度如何随时间变化来确定重力因子,使用公式(5)计算得到人体hip节点的减速度变化曲线。若该曲线有峰值,则表示该动作重力较大;若曲线平缓、没有峰值,则表明该动作是轻盈的。
}gsr}0069-1.jpg}/gsr}
流畅度是人体做动作时使用的劲力,它揭示了动作过程中受限制的程度。控制强度大的动作具有受束缚的属性,而控制强度小的动作则具有自由活动的属性。由身体中心向外部扩展的动作,比如由肩至肘到腕最后到指尖的动作是属于“流畅”或“自由”的;相反,由外向内或停顿性造型动作等收缩类型的动作,是属于“受限”或“阻塞”的。因此,我们采用计算hip节点在运动中的“急动度” 来对该因子进行测算,相当于测算运动中的一种“柔性碰撞”,以描述动作在表现过程中束缚对其产生的影响。
来对该因子进行测算,相当于测算运动中的一种“柔性碰撞”,以描述动作在表现过程中束缚对其产生的影响。
空间因素表示人体会通过力量使产生的动作占用一定的空间,反映的是舞蹈主体与外部世界的关系。空间因素的两极为“直接”与“延伸”。“直接”的力效给人有棱角与刺射的心理感觉,四肢的动作力度相对比较大;“延伸”的力效则较为温和。因此,我们通过测算双手和双脚的移动加速度 来描述身体对空间的作用力。
来描述身体对空间的作用力。
时间力效指动作维持的时间长短和动作运动形式的顺序,只有在做动作时才产生,动作停止时便停止。时间力效的两极为“快”和“慢”,是对动作的时间力效数值变化范围的描述。在舞蹈中,时间力效所强调的动作的快慢和舞蹈节奏不同。舞蹈的速度主要是为了描述表演过程的持续时间,而舞蹈的节奏则表示在表演过程中动作对音乐节拍所做出的回应。考虑到很多舞蹈动作主要是以四肢的变化为主的,所以选择骨骼中的hip节点、左右手腕、左右脚踝五个节点的平均速度来表示舞蹈的时间。该运动速度可以用公式(6)表示:
}gsr}0071-1.jpg}/gsr}
pi,r(n+1)是集合p中第i个关节点在第n帧的空间位置,i∈{hipcenter,leftwrist,rightwrist,left_ankle,right_ankle},Δt为采样时间,Δt=0.033sec。这一公式通过计算一段时间内hip节点覆盖的距离来进行速度估计。
有关人工智能舞蹈交互系统原理与设计的文章

在他们的实验中,专业舞者动作的特征向量和初学者动作的特征向量显示出很大的差异,这证明该方法对日本民族舞蹈动作的分类识别是有效的。图3-1 动作评价系统架构本章从舞蹈教学的需求出发,将拉班动作分析理论与舞蹈教学中常用指导用语的特点结合,提出一个基于拉班运动分析理论的动作评估模型。......
2023-10-29

所以在舞蹈评价方法中,我们要从姿态、节奏和力效三个方面进行分析,并在最后输出舞蹈学习者可以理解的指导语句。}gsr}0137-1.jpg}/gsr}其中,fk、fk分别表示关节运动状态的最大、最小值,这两个数值将参考人体生物力学以及舞蹈解剖学中对人体关节的定义和关节活动范围来设定。表3-2中的各关节特征值的极值范围,在实际测算过程中以舞蹈交互系统的空间坐标为准进行设定。......
2023-10-29
为了构建一个合理的S-SOFM对舞蹈姿态进行描述,我们需要以大量标准的舞蹈动作作为随机样本对该模型进行训练。在完成S-SOFM学习训练之后,每个节点都会表示一个典型的舞蹈姿态。对一个动作片段的描述就是将一个舞蹈动作离散成一组姿态序列,并将这个姿态序列投射到S-SOFM的输出空间中。每个舞蹈动作片段的直方图都是由该动作所包含的姿态的频率统计值构成的,两个舞蹈动作的相似性可以通过直方图间的相似距离来度量。......
2023-10-29

在动作识别的过程中,舞蹈动作被看作一系列姿态的时间序列。在舞蹈交互系统中,无论是动作的识别还是动作的分析与评估,都需要采用一种有效的方式对动作进行清晰的定义和可量化的描述。在后续的舞蹈交互系统中,针对动作识别和动作评估这两个研究领域,笔者将使用不同的特征子集来进行有针对性的研究。......
2023-10-29

学生与VR系统的交互有3个步骤。图3-17是计算得到的学生动作的关键帧和老师动作的关键帧的对比图,总体来说,学生存在抢拍的情况,前面部分的节奏相对于老师的来说稍微快点儿,后半部分节奏正常。图3-18是以两个动作的关键帧为时间点,计算得出的学生左臂和右臂的偏离、扩展评估曲线。第二组实验主要是为了分析学生在系统中的学习效果,我们邀请学生A和B学习数据库中的动作并对其进行评价分析。......
2023-10-29

基于上一章提出的舞蹈姿态的时空特征提取方法,针对形成的新的舞蹈动作特征集合,本章将利用S-SOFM构建一个有效的输出模型,对舞蹈动作进行聚类和分析,从而实现舞蹈动作的识别。图2-6 离散的姿态序列本书采用S-SOFM来构建输出模型。此外,由于保留了SOFM的特点,因此数据样本在重复训练分类之后生成的S-SOFM的各神经元节点之间的拓扑映射关系与原始输入样本一样。......
2023-10-29
轨迹上的实心标记分别代表动作的起点和动作的终点。L1距离的定义如下:L2距离的定义如下:L3距离的定义如下:第二个实验方案的执行过程完全一样,只不过训练生成动作单元模板的动作集在动作库中的比例变为40%,而剩下的60%用来测试识别能力。基于不同的动作模板的实验结果见表2-4至表2-7。表2-10 第三组实验的识别率统计在第四组实验中,我们加入了动作集合2,这样一共有30种动作。......
2023-10-29

所以在个性化学习需求强烈的今天,如何利用人工智能技术构建一个没有老师监督的、通过智能化方法帮助学生在舞蹈学习过程中自我修正、自我提升的舞蹈交互系统,既是挑战,也是一项非常有意义的研究工作。在动作识别的研究中,舞蹈的节奏性特征通常会被视为弱化因子,研究重点在于姿态序列的识别。不过,在动作的评估研究中,正确分析、评估舞蹈的节奏是非常重要的内容。......
2023-10-29
相关推荐