用瞬时极性法判定是正反馈还是负反馈。由图可见,引入反馈电阻RE后,使得放大电路的净输入电压UBE=ui-UE减小了,故为负反馈。因此,电路为电流串联负反馈放大电路。综上所述,射极输出器又是一个电压串联负反馈放大电路。Rf对交、直流都有负反馈。图5-19为两级放大电路电压串联负反馈放大电路留给读者分析。......
2025-09-29
1.比例(P)控制器
比例控制器如图4-3所示。比例控制器的输出信号以一定比例复现输入信号。当输入信号ui为阶跃函数时,输出信号u0(称为阶跃响应)也是阶跃函数,其幅值是ur的Kp倍。即
u0=Kpui (4-2)
其中,Kp=-Rf/R0,为比例系数。
由式(4-2)可见,比例控制器的输出与输入成比例的变化而与时间无关。显然,比例控制反应迅速,调节及时,它的输出完全由输入的当前值所决定。
无论是哪一种实际结构,也无论操作功率是什么形式,比例控制器实质大都是具有可调增益的放大器。
2.积分(I)控制器
图4-4为积分控制器原理图,输出与输入的关系为

其中,Ti=R0C1,为积分时间常数。

图4-3 P控制器
a)原理图 b)响应曲线

图4-4 I控制器
a)原理图 b)响应曲线
系统的阶跃响应为一条随时间线性增长的斜线,增长的速度与积分时间常数Ti成反比,与输入信号ui的大小成正比,即u0=t/Ti·ui。积分控制器的输出量不可能无限制地增长,它受到电源电压,或输出限幅电路的限制,其阶跃响应曲线如图4-4b所示。
积分控制器的输出特性有三个特点:
1)只要ui≠0,u0总要逐渐增长(达到饱和时为止)。
2)只有ui=0时,u0才不增长,并保持为某一固定值。
3)只要输出达到饱和值,那么必须等输入信号ui变极性后,输出u0才能减小,控制器才能退出饱和状态。
综上所述,积分器具有延缓作用、积累作用和记忆作用,积分器的输出并不取决于输入量的现状,它取决于输入量的全部历史状态。
3.比例积分(PI)控制器
比例积分控制器原理如图4-5a所示。比例积分控制器输出与输入的关系为

其中,Ti=R0C1,为PI控制器积分时间常数;
Kp=-R1/R0,为PI控制器比例放大系数。
系统的阶跃响应曲线如图4-5b所示,即u0=(Kp-t/Ti)ui。比例积分控制器的输出由比例和积分两部分组成。当输入信号为阶跃信号时,由于Cl两端电压不能突变,Cl相当于短路,此时整个控制器相当于比例控制器,其输出先跳变到Kpui,实现快速控制。随着Cl被充电,控制器又相当于积分器,输出按积分作用随时间线性增长。同样,当控制器进入深度饱和状态后,必须等输入信号改变极性,才能使控制器退出饱和状态。(https://www.chuimin.cn)
PI控制器在频率较低时主要起积分器的作用,而在高频时主要起线性比例放大器的作用。
由于PI控制器综合了P控制器和I控制器的优点,比例部分能迅速响应控制作用,积分部分则可以最终消除稳态误差,因此在控制系统中得到广泛的应用。
4.PD控制器
图4-6a是PD控制器电路原理图。如果输入信号为单位阶跃信号时,其系统响应为

其中,Kp=-(R1+R2)/R0,为PD控制器比例系数;
Td=(R1R2)C1/(R1+R2),为PD控制器微分时间常数。

图4-5 PI控制器
a)原理图 b)响应曲线
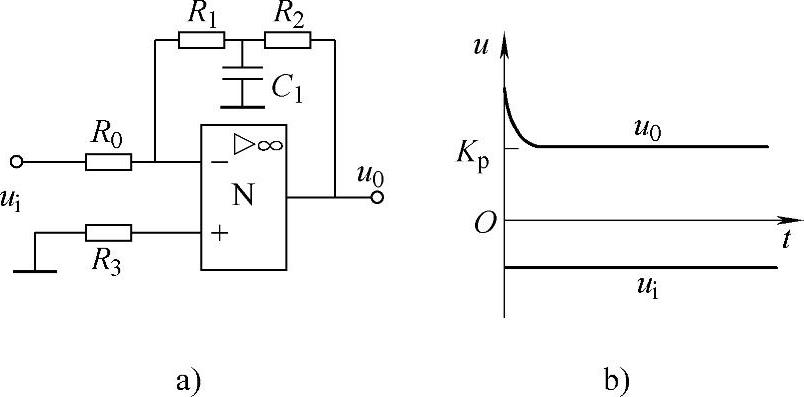
图4-6 PD控制器
a)原理图 b)响应曲线
当控制器的输入端输入一个阶跃信号ui的瞬间,反馈电压被电容Cl旁路,反馈到输入端的电压很小,故输出电压突然增至很大。随着C1充电,输出电压逐渐降低,C1充电结束后,C1相当于开路,控制器相当于P控制器,输出电压与输入电压成比例变化。系统的阶跃响应曲线如图4-6b所示。
由此可见,PD控制器具有超前控制的作用,即当控制信号有变化趋势时,PD控制器立即输出一个幅值很大的控制信号,用来加快响应过程或补偿系统的惯性。但是微分控制作用也使噪声信号得到放大,有可能使系统的执行机构达到饱和状态;而且微分控制作用只能在瞬态过程中发挥作用,因此微分控制一般不单独应用。
5.PID控制器
图4-7a为单个运算放大器构成的PID控制器原理图。如果输入信号为单位阶跃信号时,其单位阶跃响应为

其中,Kp=-R1/R0,PID控制器比例系数;
Ti=R1C1,PID控制器积分时间常数;
Td=R2C2,PID控制器微分时间常数。
C2>>C1,R1>>R2。
在控制器输入端输入一个阶跃信号ui的瞬间,反馈电压被电容C2旁路,反馈到输入端的电压很小近于零,输出电压突然增至很大,起微分控制作用。随着C2充电,反馈到输入端的电压逐渐增大,控制器输出电压逐渐降低。C2充电结束时,输出下降到某一数值,该数值与输入成比例。由于Td=R2C2比较小,故微分作用时间很短。随着C1充电,反馈到输入端的电压又逐渐减小,输出逐渐增加,实现积分作用。系统的单位阶跃响应曲线如图4-7b所示。
由此可见,三种控制作用的组合作用具有三个独立控制作用各自的优点。
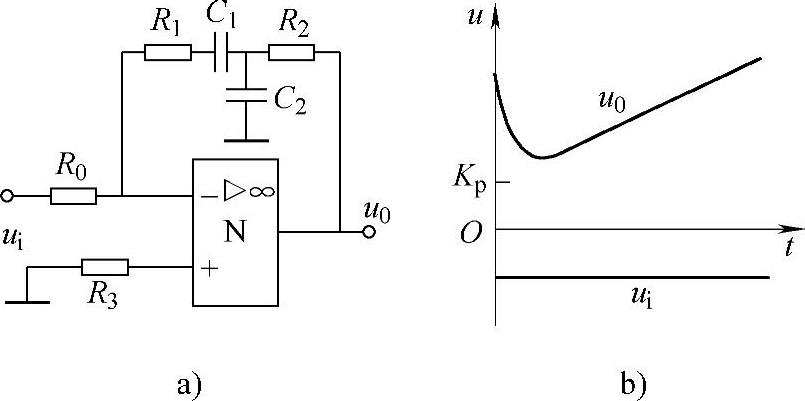
图4-7 PID控制器
a)原理图 b)响应曲线
相关文章

用瞬时极性法判定是正反馈还是负反馈。由图可见,引入反馈电阻RE后,使得放大电路的净输入电压UBE=ui-UE减小了,故为负反馈。因此,电路为电流串联负反馈放大电路。综上所述,射极输出器又是一个电压串联负反馈放大电路。Rf对交、直流都有负反馈。图5-19为两级放大电路电压串联负反馈放大电路留给读者分析。......
2025-09-29

功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。......
2025-09-29

通过对这些设备、部件间的巧妙连接和组合设计,使得低压供配电电路可适用于不同的场合和环境。这是识读低压供配电电路图的前提,只有熟悉低压配电电路中包含的元件才能识读低压配电电路的功能及工作过程。图5-23所示为典型低压供配电电路的主要部件。低压供配电电路主要是依靠低压配电设备对电路进行分配的。图5-25 低压供配电电路中配电箱中的电路连接关系①低压供配电电路将交流220V市电电压送入用户配电箱中。......
2025-09-29

单片机对于焊接参数的控制,可以通过编程实现有关工艺参数的PID控制算法,利用单片机强大的逻辑功能,可以使PID控制更加灵活。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。......
2025-09-29

直流电动机控制电路可实现多种多样的功能,如直流电动机的起动、运转、变速、制动和停机等。只有熟悉直流电动机控制电路中包含的元件才能识读出直流电动机控制电路的功能及工作过程。图5-27所示为典型直流电动机控制电路中的主要部件。第二阶段是直流电动机的停机控制过程。......
2025-09-29

下面介绍几种典型控制电路的识读方法。该控制电路是由4个双向晶闸管、4个驱动三极管和微电脑程序控制器组成的。当水位到达预定水位以后,微电脑程序控制器将进水电磁阀控制的三极管VT6截止,停止向洗涤筒内注入水。在报警灯控制电路中,晶闸管起到了可控开关的作用。图3-35 典型报警控制电路......
2025-09-29
程序和顺序控制程序控制中的被控制量是时间的函数,被控制量按照预先规定的时间函数变化,如单晶炉的温度控制。比例积分微分控制控制器的输出是控制器输入的比例、积分、微分函数的组合。PID控制是应用最广、最常见、最易懂的控制技术。PID控制结构简单、参数容易调整,因此,无论模拟控制器或者数字控制器,多数使用PID控制。存在随机扰动信号的系统,仅用PID控制是达不到满意的性能指标的。......
2025-09-29

相关推荐