机床电器控制是随着科学技术的不断发展以及生产加工工艺不断改进而不断更新的。随着新的控制理论和电器及电子元器件的出现,还将不断地推动机床电器控制继续向前发展。到了20世纪40~50年代,交磁电机扩大机-电动机控制闭环反馈系统的出现,使机床电器控制系统的控制精度、快速响应性能都有了提高。......
2025-09-29
1.问题的提出
控制的依据:(XT-XF)
控制的目标:(XF≈XT)→(XT-XF)≈0
当出现偏差区,修正偏差所需要的时间较长。另外,偏差不易完全消除。
控制过程存在的问题如图5-36所示。
2.比例增益环节(P)
引入比例增益(P)如图5-37所示。
根据频率给定信号XG接受差值ΔX干预的特点,如果将偏差信号放大KP倍后,再干预频率给定信号,则根据公式ΔX=XG/KP可知,当比例增益越大,偏差越小,储气罐的实际压力越接近于目标值。
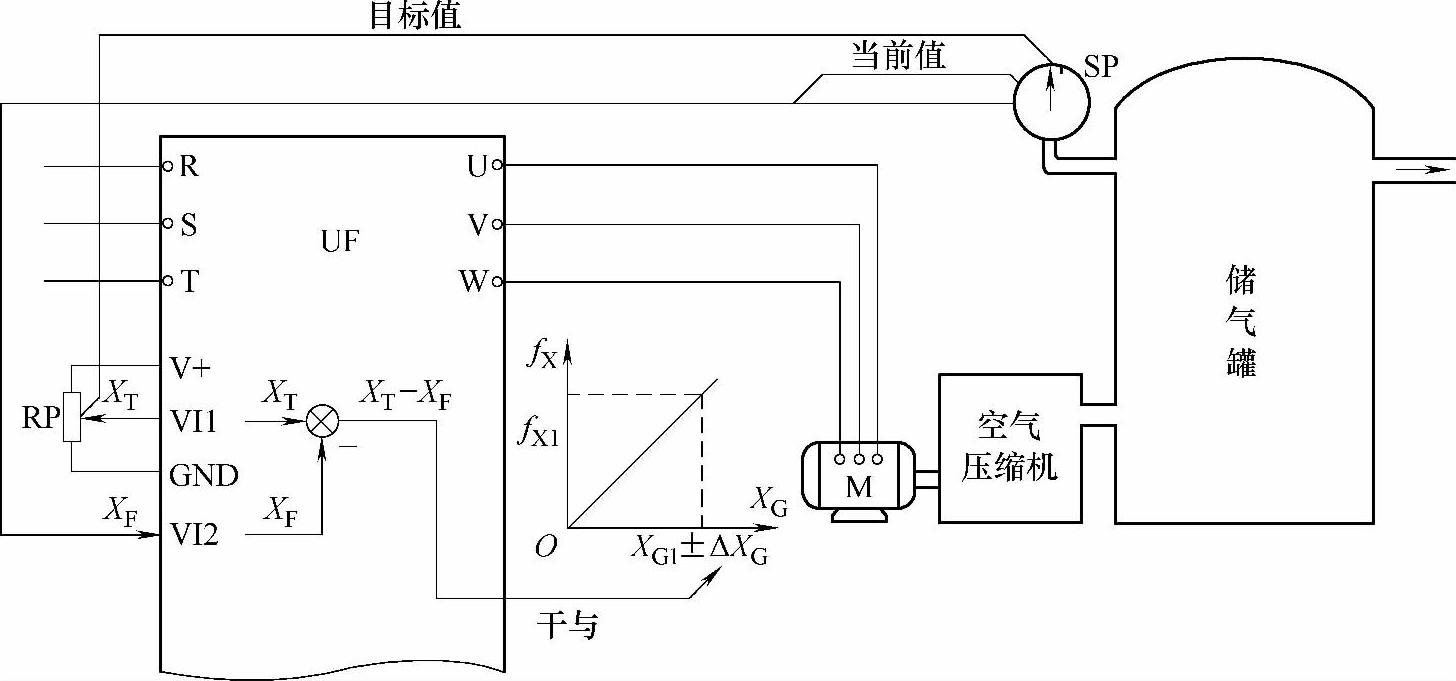
图5-36 控制过程存在的问题
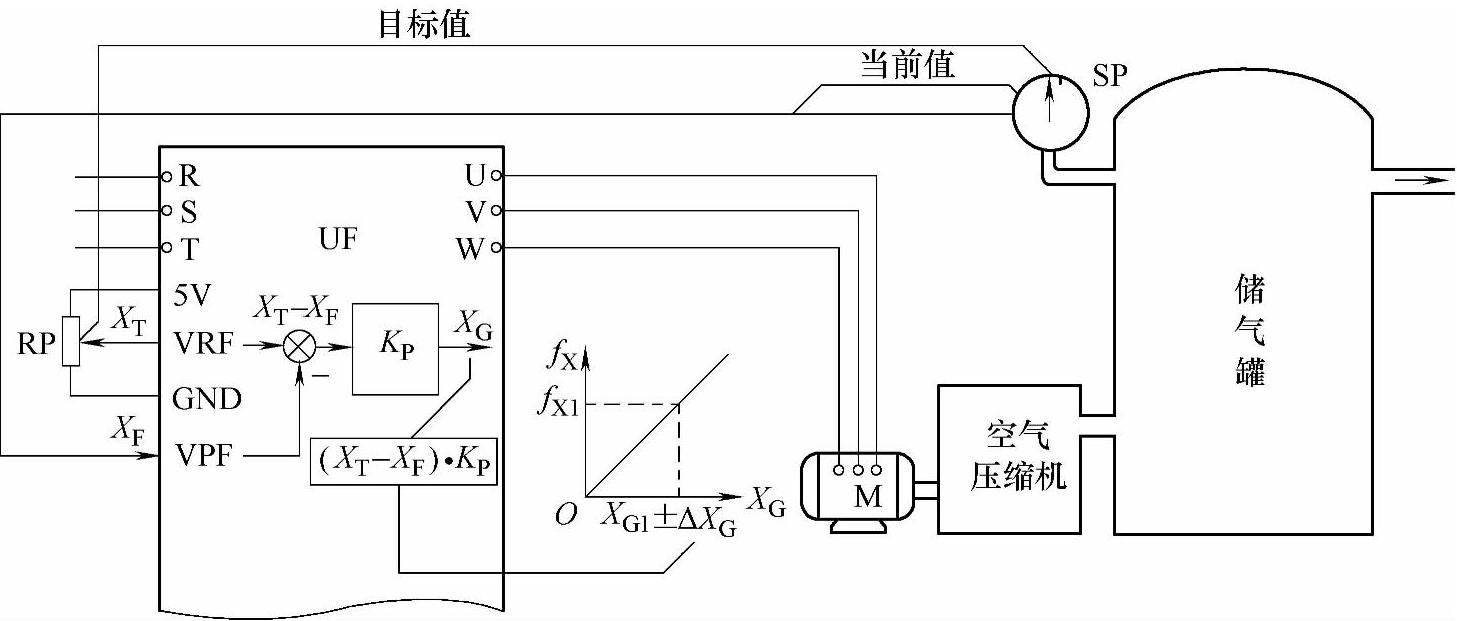
图5-37 引入比例增益(P)
比例增益与静差的关系见下表。

3.P调节出现的问题
P的大小与振荡如图5-38所示。

图5-38 P的大小与振荡
a)P调节的含义 b)P调节的结果
比例增益KP的大小,一方面决定了实际压力接近目标压力的快慢和偏差的大小,另一方面,KP越大虽然可以使偏差迅速减小,但ΔX不能消除,且易出现超调,因此引入积分环节。(https://www.chuimin.cn)
4.PI调节
为了防止超调,可以适当减小比例增益,而增加积分环节,积分时间的长短,决定了积分增量的大小,从而决定了信号增加的快慢。
PI的含义与作用如图5-39所示。
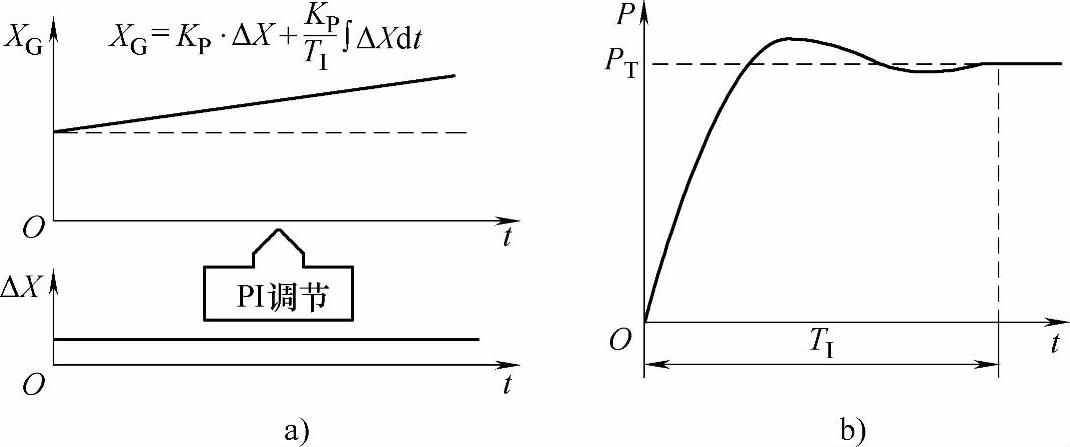
图5-39 PI的含义与作用
a)PI调节的含义 b)PI调节的结果
5.PD调节
PD的含义与作用如图5-40所示。
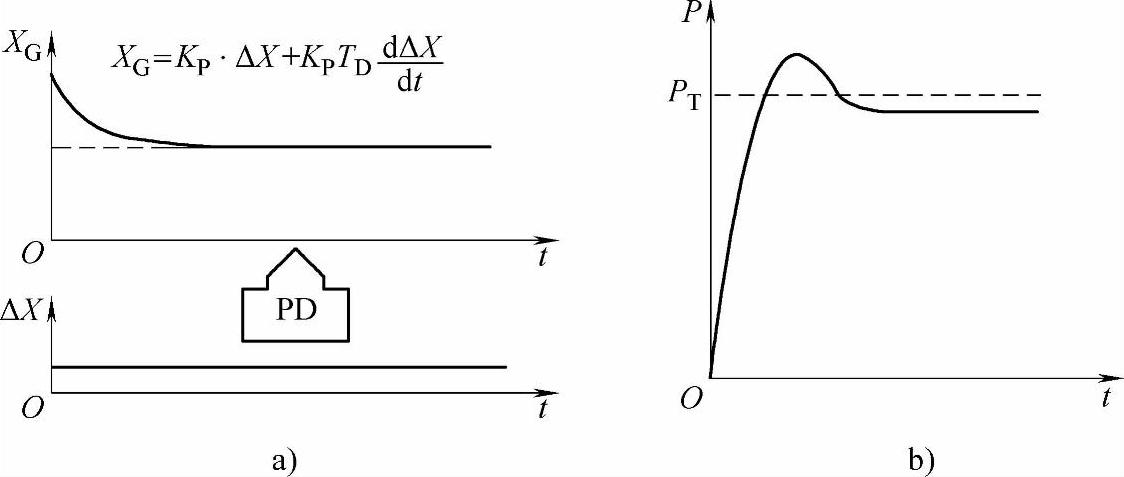
图5-40 PD的含义与作用
a)PD调节的含义 b)PD调节的结果
对于某些容易发生振荡的系统,KP只能设定得小一些,于是又会发生当用气量急剧变化时,被控量难以迅速恢复的情况,微分控制是根据偏差变化率的大小提前给了一个相应的调节动作。
微分D只是在被控量刚发生变化时,迅速地根据趋势做出反应,因此其作用时间通常是很短的。
6.PID调节
PID的含义与作用如图5-41所示。
根据以上分析,结合生产实际情况,可以引入PID调节功能,针对不同的被控对象的要求,实现不同的控制功能。
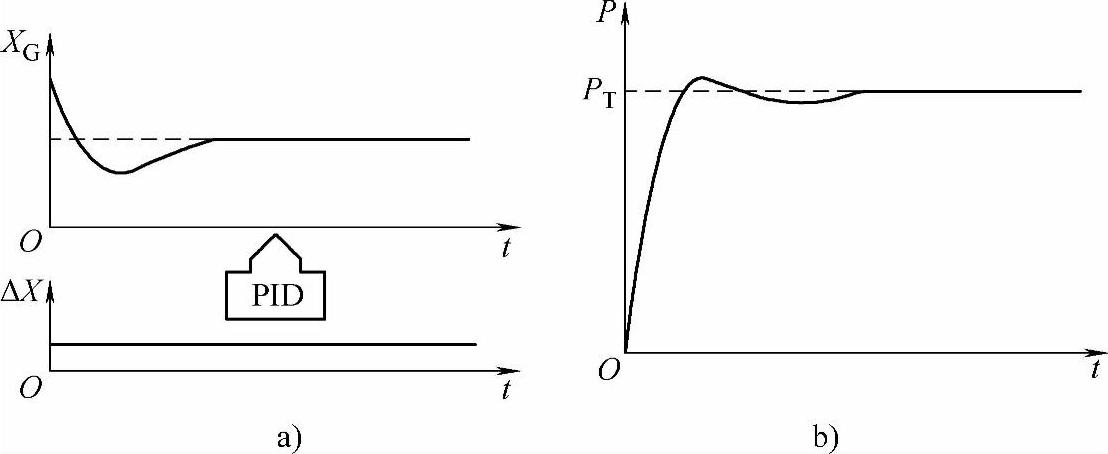
图5-41 PID的含义与作用
a)PID调节的含义 b)PID调节的结果
相关文章

机床电器控制是随着科学技术的不断发展以及生产加工工艺不断改进而不断更新的。随着新的控制理论和电器及电子元器件的出现,还将不断地推动机床电器控制继续向前发展。到了20世纪40~50年代,交磁电机扩大机-电动机控制闭环反馈系统的出现,使机床电器控制系统的控制精度、快速响应性能都有了提高。......
2025-09-29

功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。......
2025-09-29

电弧喷涂设备主要由喷枪、喷涂电源、控制箱、送丝机构等构成,如图2-22所示。图2-24所示为电弧喷涂电源电路原理。图2-24 电弧喷涂电源电路原理2.送丝机构电弧喷涂时两根金属丝需要以均匀、连续的速度送至喷涂枪,金属丝的送进依靠送丝机构来完成。......
2025-09-29

图5.14过滤器的符号过滤器的主要性能参数过滤器的主要性能参数有过滤精度、过滤比和过滤能力等。国际标准ISO4572 推荐过滤比的测试方法是:在油箱中不断加入某种规格的污染物(试剂),液压泵从油箱中吸油,输出的油液通过被测过滤器,然后回油箱;测量过滤器入口与出口处污染物的数量,即得到过滤比。最常用的有网式和线隙式过滤器两种。此种过滤器结构简单,清洗方便。如图5.15所示为线隙式过滤器。......
2025-09-29

大包滑动水口布置在钢包底侧,图上侧为大包底部,下侧为液压缸驱动的滑动水口装置。正常生产过程中突然发生停电等事故,蓄能器会自动提供液压油,使用事故关闭换向阀3关闭滑动水口,以确保设备和人身安全。......
2025-09-29

当然,OB35的周期设置可以根据工艺实际要求而定。表9-3 PID软件编程步骤为了保证执行频率一致,块应当在循环中断OB中调用。图9-3 设置SFB41的背景DB为DB3具体的PID调用程序如图9-4所示。图9-4 PID程序调用在PID程序调用中,“CYCLE”参数对应的是扫描时间,必须将程序块调用的间隔时间赋值在这里。当前值显示在窗口的右上部。9)单击“关闭”按钮,终止曲线记录器的功能。......
2025-09-29
工业机器人可以在工业生产线中自动完成点焊、弧焊、喷漆、切割、装配、搬运、包装、码垛等作业。大部分工业机器人为关节型机器人,关节型机器人的机械臂是由若干个机械关节连接在一起的集合体。图5-31工业机器人的基本组成1—示教器;2—控制器;3—机器人本体图5-32典型六关节工业机器人①机座。......
2025-09-29

但它是与遥控器及本机键盘的操作控制同步工作的。有关各继电器的开关控制线路可依实物的具体情况进行分析。在有些空调器中,传感器检测电路有多种形式,用于不同的功能检测,但它们的工作原理是一致的。......
2025-09-29
相关推荐