检测前轮侧滑量的主要目的是确认前轮前束与前轮外倾的配合是否恰当。知识点一侧滑试验台检测原理以汽车前轮为例,介绍侧滑试验台的检测原理,侧滑试验台外形如图3-18 所示。滑动板向内的靠拢量,即为该前轮的侧滑量。前轮前束是为纠正前轮外倾后致使前轮向外张开滚动这一不足而出现的。此时,若汽车的前轮通过上述滑动板,则两滑动板分别向外滑动。测量装置能把车轮侧滑量测出并传递给指示装置。......
2023-10-11
图2所示为线结构光视觉传感器测量空间圆(类圆)孔中心位置的原理示意图。图2中摄像机采用正直摆放姿态,激光投射器斜向摆放。
测量分析过程采用如下约定。
1)摄像机光心由符号Oc表示,结构光光源中心由符号O1表示,线结构光视觉传感器测量坐标系定义为与摄像机坐标系Ocxcyczc重合。
2)被测空间圆(类圆)孔中心由符号Oh表示,Oh在Ocxcyczc坐标系中空间坐标定义为(x,y,z),延长直线OhOc与光平面πs交于一点,由符号P表示,P在Ocxcyczc坐标系中空间坐标定义为(xP,yP,zP)。
3)光平面πs与空间圆(类圆)相交于弦AB,弦AB中心由符号Q表示,Q在Ocxcyczc坐标系中空间坐标定义为(xQ,yQ,zQ)。
4)为简化分析,假定激光平面与摄像机坐标系yc轴平行。
5)旋转角度逆时针为正,顺时针为负。
6)Oh点x向、y向及z向测量坐标分别由符号xm、ym及zm表示。
在满足线结构光视觉传感器工作距离及测量景深的前提下,线结构光传感器与被测空间圆(类圆)孔之间的理想测量位姿关系应满足以下条件:
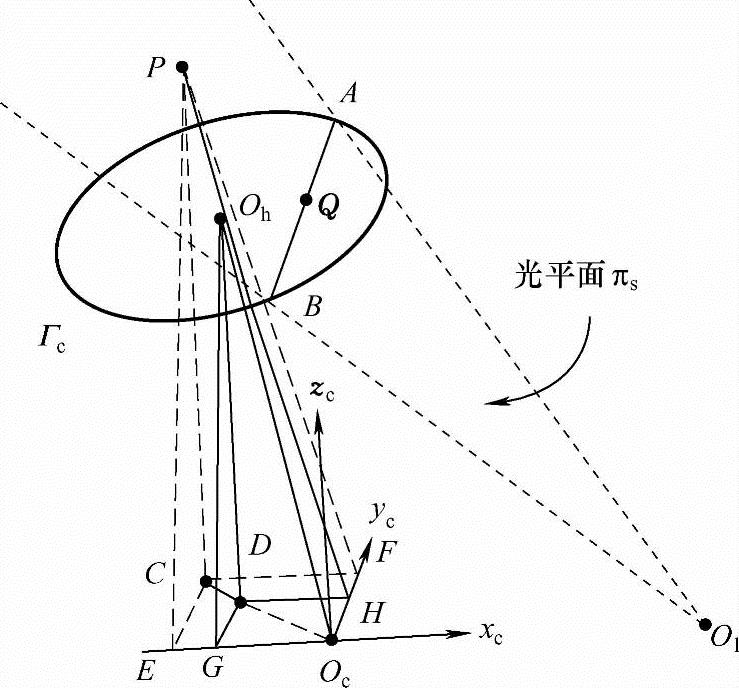
图2 线结构光传感器测量空间圆孔中心坐标原理图
1)摄像机像面与空间圆(类圆)孔圆面平行。
2)光平面与空间圆(类圆)孔相交(是否过其中心均可)。
根据空间椭圆透视投影变换模型[6],当空间圆(类圆)平面与摄像机像面平行时,由像面上椭圆拟合求得的中心等同于空间圆(类圆)中心的实际投影,而当摄像机像面与空间圆(类圆)所在的平面不平行时,必然存在透视投影畸变,两个平面所成角度越大,畸变误差越大。因此条件1的近似满足不仅可以保证被测圆(类圆)孔的图像为理想图像,减小由于透视投影畸变引起的圆(类圆)中心坐标测量误差,同时也可以最大限度消除圆(类圆)中心z向坐标的实际测量误差。条件1在实际测量中不可能精确满足,但应尽可能满足。条件2是采用线结构光视觉传感器实现空间圆(类圆)孔中心位置测量的必要条件,在实际测量中也容易实现。在满足上述两个条件的前提下,采用下述两步法可以实现线结构光传感器对空间圆(类圆)孔中心位置的测量。
两步法测量基本原理如下。
1)根据线结构光视觉传感器测量模型,测量光平面与空间圆孔相交直线中心Q点的空间坐标(xQ,yQ,zQ),zQ作为被测圆心Oh的近似z向坐标,即z≈zQ。
2)根据已求得被测圆心Oh的近似z向坐标zQ以及Oh相对摄像机光心Oc的方位,确定被测圆心Oh的x、y向坐标。
有关激光及光电测试技术叶声华科研团队论文集的文章

检测前轮侧滑量的主要目的是确认前轮前束与前轮外倾的配合是否恰当。知识点一侧滑试验台检测原理以汽车前轮为例,介绍侧滑试验台的检测原理,侧滑试验台外形如图3-18 所示。滑动板向内的靠拢量,即为该前轮的侧滑量。前轮前束是为纠正前轮外倾后致使前轮向外张开滚动这一不足而出现的。此时,若汽车的前轮通过上述滑动板,则两滑动板分别向外滑动。测量装置能把车轮侧滑量测出并传递给指示装置。......
2023-10-11

图5.17 直接光学法确定图像中心的标定原理4)基于中心无畸变区的摄像机光学中心标定方法 基于中心无畸变区的摄像机光学中心标定方法利用的是透视成像的基本原理。求解光学中心的矩阵表达式对式和式用最小二乘法求解,便可得到模板点的轨迹方程和光学中心坐标。给定r1、r2、r4、r5,则R有两个解,另一个为具体选择哪一个,可由试探法确定。......
2023-11-24

图4.10 边缘模型边缘检测是基于边界分割方法的最基本处理。实际边缘模型是如图4.10b所示的水平剖面图,称为斜坡边缘。斜坡部分与边缘的模糊程度成比例。阶跃型边缘处于图像中两个具有不同灰度值的相邻区域之间,其灰度变化曲线的一阶导数在边缘处出现极值,而二阶导数在边缘处出现零交叉。脉冲型边缘主要对应于细条状的灰度值突变区域。边缘检测包含两个方面含义:1)检测边缘点或边缘线段。......
2023-11-24
空域微分算子法这也是传统的边缘检测算法。小波多尺度检测利用多种尺度的边缘检测算子对图像进行检测,然后综合它们的检测结果以获得理想的输出。基于数学形态学的边缘检测数学形态学是一种有代表性的非结构数学方法。其中,空域微分算子法、曲面拟合法等属于经典的边缘检测算法。图像处理中基于一阶微分的边缘检测是通过梯度法实现的。图4.12所示模板表示图像3×3区域的图像点。......
2023-11-24

测功装置用于吸收和测量汽车驱动轮的输出功率,因此通常被称为测功器。知识点二台架检测项目内容汽车动力性室内台架试验,主要是用无外载测功仪检测发动机功率,用底盘测功机检测汽车的最大输出功率、最高车速和加速能力。......
2023-10-11

盐浴渗硼1)渗硼设备采用坩埚式盐浴炉,炉膛温度均匀性达到±15℃。渗硼后热处理的目的只是为了提高渗硼件的基体强度。②渗硼后淬火与回火。对心部强度要求较高的渗硼件,在渗硼后还需进行热处理。6)渗硼检测按照JB/T 7709—2007《渗硼层显微组织、硬度及层深检测方法》进行。2)固体渗硼应采用热装炉,避免700℃以下长时间加热。渗硼后的热处理及组织检测与盐浴渗硼工艺相同。......
2023-06-24

由于各工程公司规模与管理体制的不同,对施工测量的管理体系也不一样。另一种施工测量体制是工程公司的规模也不小,但对施工测量工作的重要性与技术难度认识不足,以精简上层为名仅在项目部(工程处)设施工测量班组,由放线工组成,受项目工程师或土建技术员领导。实践证明,上述两种施工测量管理体制,以前者效果为好,具体反映在以下3个方面:1)测量专业人才与高新设备可以充分发挥作用,不同水平的放线工也能因材适用。......
2023-08-27
相关推荐