
摩阻与润滑是摩擦学中两个截然相反的概念。这种涂层不含有机化合物,特别适合于高温及不能润滑的场合作摩阻材料。......
2025-09-29
1.正多边形空间电压矢量
SVPWM利用八个空间电压矢量中的六个工作矢量计算生成幅值和方向不同的空间电压矢量,控制各空间电压矢量的作用时间,以形成多边形磁链轨迹。多边形每条边由两个相邻的电压空间矢量合成,如图5.5的t0~t2,是uS2和uS3作用,它们的合成矢量us如图5.15所示,调节uS2的作用时间t1和uS3的作用时间t2就可以改变合成电压矢量us的大小和方向角λ。由图5.15可知


且
us=Uscos(λ+γ)+jUssin(λ+γ)] (5.20)
比较式(5.19)和式(5.20)的实部和虚部,在uS2和uS3合成时, ,可得
,可得
由式(5.22)可得

将式(5.23)代入式(5.21),式(5.24)代入式(5.22),且令调制度 ,得
,得

将t1代入式(5.23)可得

对于正N边形,每条边的作用时间为 ,一般N为6的倍数。磁链平面可分6个扇区(见表5.4),每个扇区有
,一般N为6的倍数。磁链平面可分6个扇区(见表5.4),每个扇区有 条边,每条边对应的λ分别为
条边,每条边对应的λ分别为 、λ2=λ1+
、λ2=λ1+ ,…。例如N=12,每个扇区磁链轨迹有2条边,
,…。例如N=12,每个扇区磁链轨迹有2条边, ,
, 。由于扇区的对称性,因此计算一个扇区的n组t1和t2可以用于其他扇区。图5.16是12边形电压矢量轨迹,其中图5.16a每条边由两个电压矢量合成,图5.16b将两个电压矢量中的一个一分为二,放在另一个电压矢量的前后,每条边由三段电压矢量合成。(https://www.chuimin.cn)
。由于扇区的对称性,因此计算一个扇区的n组t1和t2可以用于其他扇区。图5.16是12边形电压矢量轨迹,其中图5.16a每条边由两个电压矢量合成,图5.16b将两个电压矢量中的一个一分为二,放在另一个电压矢量的前后,每条边由三段电压矢量合成。(https://www.chuimin.cn)
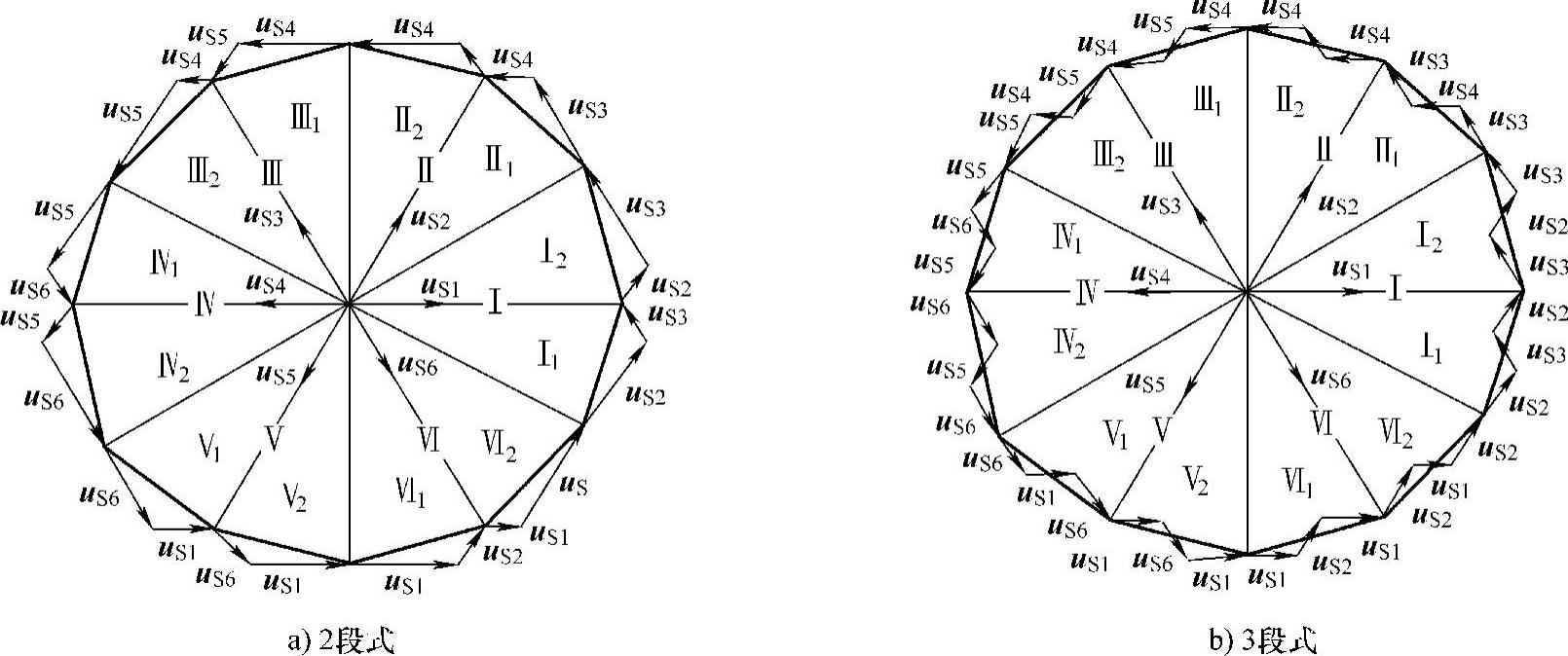
图5.16 12边形电压空间矢量轨迹
2.零矢量插入方式
由式(5.26)

式中,电压矢量作用时间系数 。
。
因为VVVF控制一般在额定电压下调节Us≤UsN,
,因此
,t1+t2<T0,两个电压矢量作用时间小于多边形每边的时间,其不足的时间需要用零矢量补足,零矢量作用时间为:
t0=T0-(t1+t2)=T0(1-K) (5.28)
插入零矢量的方式有多种,零矢量可以插在工作电压矢量的前后,也可以插在工作电压矢量的中间,零矢量可以集中插入,也可以分散插入。从表5.1可见,在相邻两个电压矢量中间插入零矢量,无论是us7(000)或us8(111)都不能保证插入前后开关次数最少,以开关次数最少要求,零矢量要插在工作电压矢量的中间,下面介绍一种三角波调制的方法(图5.17)。
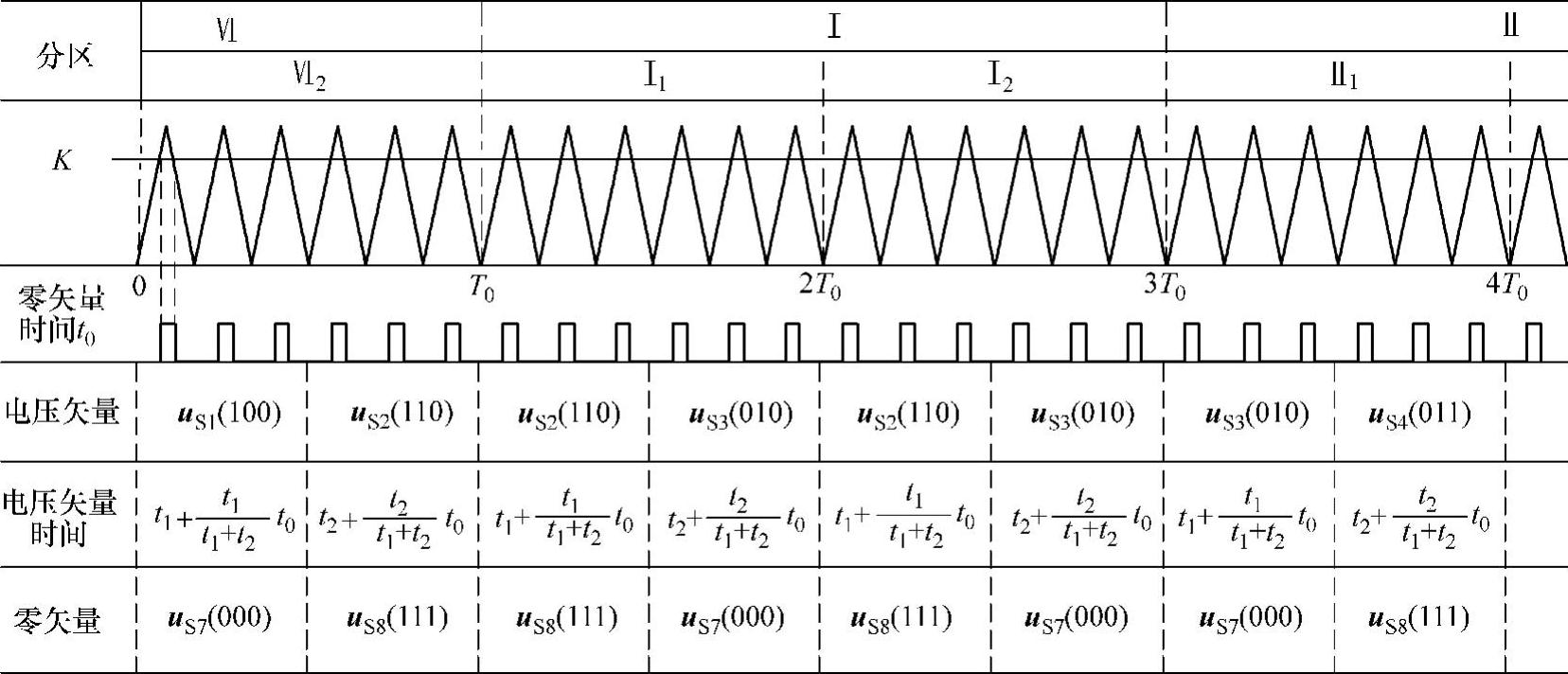
图5.17 三角波插入零矢量
用高频三角波与电压矢量时间系数K比较产生零矢量脉冲,脉冲宽度是零矢量插入时间,用三角波调制零矢量是分散插入,在多边形各区间如果出现零矢量脉冲,就插入相应的零矢量,例如12边形的Ⅰ扇区Ⅰ1分区,作用电压矢量为uS2(110),当有零矢量脉冲时就插入uS8(111),在uS3(010)时,有零矢量脉冲就插入uS7(000),零矢量作用时间受各分区的矢量作用时间系数K调制。SVPWM的调制频率是三角波频率,三角波频率越高,电压谐波减小,这与SPWM调制是一样的,SVPWM是三角波与电压矢量时间系数K的比较,计算量较小,可以使系统响应更快。
相关文章

在电气图中,用于表示回路种类、特征的文字和数字标号称为回路标号。交流二次回路的标号原则与直流二次回路相似。在二次回路中,除电气元器件、设备、线路标注文字符号外,为简明起见,其他只标注回路标号。......
2025-09-29

无线MODEM是为数据通信的数字信号在具有有限带宽的模拟信道上进行无线传输而设计的,它一般由基带处理、调制解调、信号放大和滤波、均衡等几部分组成。调制是将电信号转换成模拟信号的过程,解调是将模拟信号还原成电信号的过程。无线MODEM一般常见的接口有RS232串行口、USB口和PC卡式接口。无线MODEM应用主要分为两个部分:一种是GSM通信模式,另一种是TCP/IP通信模式。现有的高端无线MODEM均能向下兼容GSM网络平台。......
2025-09-29

继电器是根据某种特定形式的输入信号接通或断开小电流控制电路,实现远距离自动控制和保护的自动电器。按用途可分为控制和保护继电器。图1-23 继电器特性1.熟悉继电器的结构和工作原理及其用途。......
2025-09-29

由于地磁计转数测量的有效信息是感应信号的频率或周期, 而非幅值, 所以在实际应用中, 可以通过信号调理电路尽可能大地放大信号。当计数值与预先装定的转数相同时, 计数器给出起爆信号, 从而实现计转数起爆控制。图5-15地磁计转数实现过程2.计转数电路系统设计计转数信号调理电路的主要功能是将传感线圈中的微弱信号进行放大, 同时对高频噪声进行抑制。......
2025-09-29

S7-1200 PLC提供了运行中修改速度和位置的功能,可以使运动系统在停止的情况下,实时改变目标速度与位置。可以看出,S7-1200运动控制功能的实现包含以下4部分:图9-27 运动控制功能原理示意图①相关执行设备。执行设备主要包括伺服驱动器和伺服电动机,CPU通过硬件输出,给出脉冲与方向信号,用于控制执行设备的运转。在“脉冲选项”中,脉冲发生器有两种类型:PTO与PWM,使用运动控制功能时需要选择PTO方式。......
2025-09-29
1.结构和原理图2-14所示单作用叶片泵的定子2具有圆柱形内表面,定子和转子1间有偏心距e,叶片3装在转子槽中,并可在槽内移动,当转子回转时,由于离心力的作用,使叶片紧靠在定子内壁,这样在定子、转子、叶片和两侧配油盘间就形成若干个密封的工作区间,当转子按图2-14所示的方向回转时,在图的右部,叶片逐渐伸出,叶片间的工作空间逐渐增大,从吸油口吸油,这就是吸油腔。......
2025-09-29

热喷涂技术工艺方法很多,各有特点,无论何种工艺方法,喷涂过程中形成涂层的原理和涂层结构基本一致。热喷涂形成涂层的过程一般经历四个阶段:喷涂材料加热熔化阶段、雾化阶段、飞行阶段、碰撞沉积阶段。当喷涂材料为粉末时,粉末材料被加热到足够高的温度,超过材料的熔点形成液滴时,在高速气流的作用下雾化破碎成更细微粒并加速飞行。......
2025-09-29
相关推荐