直接转矩控制和矢量控制都是高性能的异步电动机调速控制方式,两者的特点如下:1)直接转矩控制通过逆变器开关直接控制定子磁链,从而控制电动机转速。直接转矩控制的逆变器开关由空间电压矢量控制,而空间电压矢量的选择直接由电动机转矩控制,从计算量来说,矢量控制较大。因此,从响应速度来说,直接转矩控制有一定优势。直接转矩控制系统和矢量控制系统性能比较见表5.5。......
2023-06-19
系统的转矩控制包括转向的控制和转矩大小的控制两个方面,转向和转矩大小都可以用两点式调节器,如图5.14所示。在电动机正转和反转制动时ASR输出Te∗极性为“+”,在反转和正转制动时ASR输出Te∗极性为“-”,Te∗信号的极性用于在指定扇区内选择相应电压矢量。Te∗为正时,输出P/N信号为“1”状态,这时应选择电压矢量us使Ψs正转(逆时针旋转);转向为负时,P/N信号为“0”状态,应选择电压矢量使Ψs反转(顺时针旋转)。P/N信号状态是选择电压矢量的条件之一。
转矩大小是通过插入零矢量控制的,插入零矢量使定子磁链停止旋转,转矩角θ减小,转矩下降。在电动机正转,转矩Te≠Te∗时,转矩偏差ΔTe经两点式控制器判定输出WU的状态。在Te∗>Te、 时,需要转矩增加,不用插入零矢量WU=0;在Te∗<Te、
时,需要转矩增加,不用插入零矢量WU=0;在Te∗<Te、 时,表示要减小转矩,需要插入零矢量
时,表示要减小转矩,需要插入零矢量 。在滞环内,当ΔTe从
。在滞环内,当ΔTe从 T时,
T时, ,增加转矩,不插入零矢量;当ΔTe从
,增加转矩,不插入零矢量;当ΔTe从 时,
时,
 ,插入零矢量,减小转矩。回环宽度ΔT决定了插入零矢量的时间,也决定了电动机定子电压的调制频率,容差ΔT越小调制频率越高,容差ΔT越大调制频率越低。在反转的情况,因为Te∗和Te的极性改变,转向与
,插入零矢量,减小转矩。回环宽度ΔT决定了插入零矢量的时间,也决定了电动机定子电压的调制频率,容差ΔT越小调制频率越高,容差ΔT越大调制频率越低。在反转的情况,因为Te∗和Te的极性改变,转向与 的关系见表5.3。
的关系见表5.3。
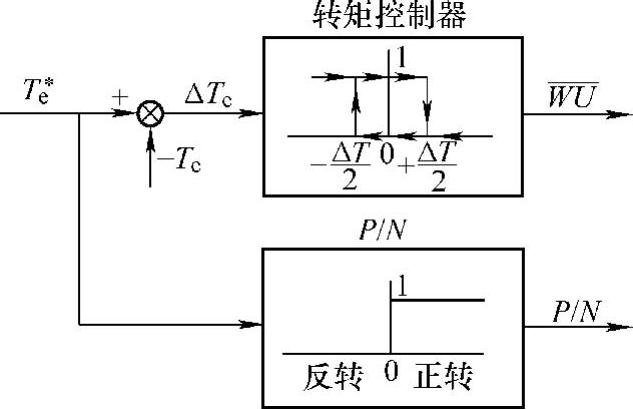
图5.14 转矩极性和转矩控制器
表5.3 转矩控制器输出与转向关系

有关电机运动控制系统的文章

直接转矩控制和矢量控制都是高性能的异步电动机调速控制方式,两者的特点如下:1)直接转矩控制通过逆变器开关直接控制定子磁链,从而控制电动机转速。直接转矩控制的逆变器开关由空间电压矢量控制,而空间电压矢量的选择直接由电动机转矩控制,从计算量来说,矢量控制较大。因此,从响应速度来说,直接转矩控制有一定优势。直接转矩控制系统和矢量控制系统性能比较见表5.5。......
2023-06-19

图4.14 转速、磁链闭环矢量控制系统仿真模型1.仿真模型图4.12所示带转矩内环的转速、磁链闭环矢量控制系统仿真模型如图4.14所示。图4.18 定子磁链轨迹图4.19 转矩-转速特性......
2023-06-19

图4.12 采用电压型电流跟踪逆变器的带转矩内环的转速、磁链闭环矢量控制系统系统检测出异步电动机转速ω和三相电流后,由电流变换和磁链观测模块计算图4.12所示系统的定子电流的转矩分量ist、转子磁链Ψr和定向角φ,并按式计算电动机的转矩反馈信号Te。图4.13 采用SPWM逆变器的带转矩内环的转速、磁链闭环矢量控制系统......
2023-06-19

功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。......
2023-06-18

直接转矩控制估计定子磁链,由于定子磁链的估计只牵涉到定子电阻,因此对电动机参数的依赖性大大减弱了。直接转矩控制采用了转矩反馈的砰-砰控制,在加减速或负载变化的动态过程中,可以获得快速的转矩响应。图2-10给出了直接转矩控制的原理框图。直接转矩控制系统分别控制异步电动机的转速和磁链。......
2023-06-19
1)采用低损耗、长寿命的MOSFET场效应管作为控制器的主要开关器件。1)共负极控制方式,48V系列为共正极控制,多路太阳能电池方阵输入控制。表4-6大功率控制器的技术参数续表4.4.5.3 光伏控制器的选型式中 I 0——光伏控制器的控制电流,A;P 0——太阳能电池阵列的峰值功率,Wp;V——蓄电池的额定电压,V。......
2023-07-02

图8.44中仿真时间为0.4s,为了更清晰地看出转矩和三相电流的变化,将其中局部图单独给出。从图8.43、图8.45和图8.46中可以看出,尽管发动机阻力矩变化很大,电动机转矩依然具有较好的动态跟随性,使得三相电流在0.04 s 之后恢复为正弦波变化,这也是电动机控制的最佳效果。图8.43转矩跟随曲线(局部)图8.44转矩跟随曲线图8.44转矩跟随曲线图8.45三相电流曲线(局部)图8.45三相电流曲线(局部)图8.46三相电流曲线图8.46三相电流曲线......
2023-06-23

欲使异步电动机控制系统解耦,关键是要找出两个分别决定磁通和电磁转矩的独立控制量,而且必须求出这两个控制量和能直接测量及控制的定子坐标变量的关系。联邦德国Blaschke等学者在1971年提出的磁场定向型矢量变换控制首先实现了这种控制思想,应用这种矢量变换控制构成了一个磁通反馈的变频调速系统。......
2023-06-25
相关推荐