图5.11 世界坐标系与摄像机坐标系不重 合时的投影成像2.世界坐标系与摄像机坐标分开时的摄像机模型考虑更一般的情况,即摄像机坐标系和世界坐标系分开的情况,但仍将平面xy和像平面x′y′重合。图5.11所示为这种情况下的摄像机几何模型,像平面中心(原点)与世界坐标系的位置偏差记为矢量D,其分量为Dx、Dy、Dz。图5.12所示为考虑这些因素时的通用摄像机模型示意图。......
2023-11-24
固态摄像机的图像传感器是一种全固化器件,其光敏单元依据光电效应原理将光辐射的能量转换为电信号。这些光敏单元与摄像机物镜结合,即构成固态摄像机。固态摄像机的光敏器件,主要有以下类型:
1)电荷耦合器件(CCD)。有线阵扫描CCD和面阵扫描CCD两种结构。还有互补性金属氧化物半导体(Complementary Metal-oxidesemiconductor,CMOS),又称自扫描光敏二极管阵列。
2)电荷注入器件(Charge Injection Device,CID)。
3)位置传感探测器(Position Sensitive Detector,PSD)。
上述光敏器件都是感光半导体器件,即利用光敏半导体器件进行光与电的转换。其中,基于CCD的各种摄像设备使用最为广泛。固态摄像机具有以下明显特点:
1)全固体化、体积小、重量轻、不受电磁现象干扰。
2)像元几何位置精度高且不会变动。
3)可选取不同的固态图像传感器,以探测不同波长的发光物体。
1.固态摄像机性能指标
2)横向和竖向像素数;
3)模拟信号的传输频率;
4)视频信号的传输制式(NTSC、PAL);
5)最低照度要求;
6)可用物镜型号;
7)电源电压;
8)作业湿度与温度;
9)功耗及外形尺寸、重量等。
2.固态摄像机的色彩生成方法(www.chuimin.cn)
固态摄像机的色彩生成方法主要有两种:
1)在图像传感器前放置一个旋转的彩色滤波轮,用滤波轮上的滤光片生成红-绿-蓝或青-品红-黄三种标准光谱带的图像,或使用三个有固定滤光片的CCD芯片。
2)利用传感器芯片各传感元所敏感的波段。
3.固态摄像机一般结构组成
如图2.29所示,在物镜1与传感器芯片5之间布置了几个光学元件。红外滤光片2用于滤去波长大于700nm的光波,这样摄像机所摄图像大体与人眼光谱范围及一般彩色感光片的光谱范围一致。漫射镜片3多为一个双折射石英板,起低通滤波作用。这些是行间传输方式的大多数摄像机所必需的部件。行间传输方式的CCD多使用电子快门。玻璃保护片4用以保护传感器芯片5。一般来说在设计物镜1时,并未综合考虑红外滤光片2和漫射镜片3的影响,因而降低了摄像机的整体性能。
4.视频信号的传输制式
(1)彩色电视制式
1)NTSC(National Television System Committee,美国国家电视标准委员会)制式,主要应用于南美洲、北美洲和日本,摄像频率为60Hz,525行,隔行扫描方式。
2)PAL(Phase Alternation Line,相位交替行)制式,主要应用于欧洲和我国。
3)SECAM(色彩顺序传送与存储)制式,主要应用于法国。
4)EIA(Electronics Industry Associa-tion,电子工业协会)制式。
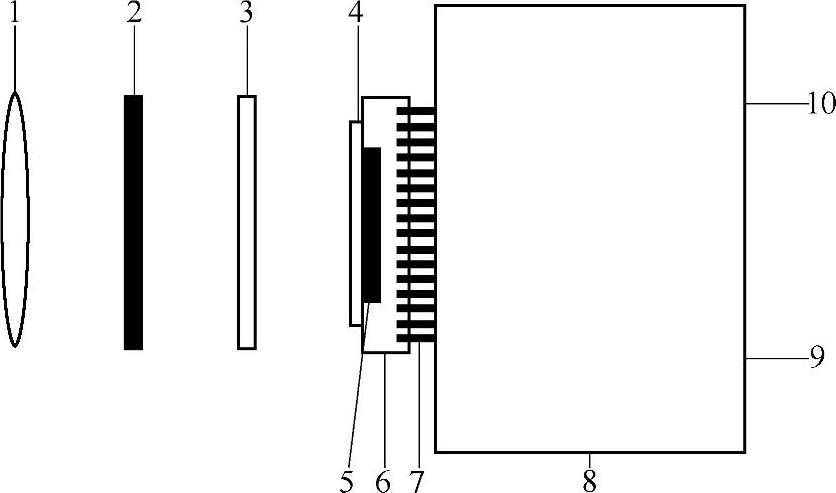
图2.29 固态摄像机一般结构组成
1—物镜 2—红外滤光片 3—漫射镜片 4—玻璃保护片 5—传感器芯片 6—陶瓷衬底 7—插接件 8—电子部分 9—电源 10—信号
(2)黑白电视制式
1)RS-170制式,属NTSC制式,主要应用在南美洲、北美洲和日本,场(Field)频率为60Hz,行频率为15750Hz,525行,隔行扫描方式。
2)CCIR(Consultive Committee of International Radio,国际无线电咨询委员会)制式,主要应用于欧洲,场频率为50Hz,行频率为15625Hz,625行,隔行扫描方式。
3)RS-330制式,用于光栅扫描系统的标准格式,非隔行扫描。
有关视觉测量技术的文章

图5.11 世界坐标系与摄像机坐标系不重 合时的投影成像2.世界坐标系与摄像机坐标分开时的摄像机模型考虑更一般的情况,即摄像机坐标系和世界坐标系分开的情况,但仍将平面xy和像平面x′y′重合。图5.11所示为这种情况下的摄像机几何模型,像平面中心(原点)与世界坐标系的位置偏差记为矢量D,其分量为Dx、Dy、Dz。图5.12所示为考虑这些因素时的通用摄像机模型示意图。......
2023-11-24

下面简要介绍Marr视觉理论的基本思想和框架。图1.1 Marr视觉信息处理的三个阶段第一阶段是早期视觉处理,其目的是从输入的原始图像中抽取观察者周围景物表面的物理特性,如距离、表面方向、材料特性等,并构成要素图或基元图。表1.2 由图像恢复形状信息的表达框架3.Marr视觉理论的意义及不足Marr视觉理论是计算机视觉研究领域的划时代成就。图1.2 改进后的Marr视觉理论框架限于历史等因素,Marr没有研究如何用数学方法严格地描述视觉信息的问题。......
2023-11-24
图6.3所示为镜像式的虚拟立体视觉结构。并由光路反射可以确定虚拟摄像机的摆放角为由式(6.8)和式(6.9)即可确定模拟双目视觉传感器左、右虚拟摄像机的坐标和摆放角度。并由式(6.9)可推出反射镜M2L与M2R的摆放角度β必须不小于反射镜M1L与M1R的摆放角度α。......
2023-11-24

如果摄像机事先移动的两个位置确定下来,该系统只需要一次标定,即可构成双目视觉测量系统。图7.12 摄像机移动构成双目视觉系统这种结构的特点如下:1)采用单摄像机,降低了系统的成本;根据摄像机移动位置的不同,很容易构成不同基线距的双目视觉测量系统,具有很大的灵活性。......
2023-11-24

多数情况下,这些参数必须通过实验与计算才能得到,这个过程称为摄像机的标定。摄像机标定一般分为经典标定方法和自标定方法。当前对传统摄像机标定技术的研究集中在非线性畸变校正。自标定方法不依赖于标定参照物,仅利用摄像机在运动过程中周围环境的图像与图像之间的对应关系对摄像机进行标定。图5.1 摄像机标定系统图5.2 标定靶标的控制点类型......
2023-11-24

计算机视觉测量技术以图像传感器为手段检测空间物体的空间三维坐标,进而检测物体的尺寸、形状和运动状态等。美国、加拿大、日本等发达国家早在20世纪60年代后期就已经开始了计算机视觉测量技术的研究。直到20世纪90年代,随着计算机技术的发展成熟,计算机视觉测量技术逐渐成为一个研究热点。......
2023-11-24

张正友法是介于传统标定方法和自标定方法之间的一种方法。张正友法采用平面标定模板,只需对标定模板的不同方向进行拍摄,而不需知道标定板的运动方式。图5.20 张正友法标定流程1.基本投影方程符号说明首先,根据前述的摄像机模型,对本小节中将要用到的符号进行说明。它们的齐次矢量表示形式分别为,。在这种情况下,需要用非线性优化使这种偏差达到最小,从而获得使偏差最小时的参数为摄像机参数的估计值。......
2023-11-24
相关推荐